




Contents
Scroll to:
https://doi.org/10.23947/2687-1653-2022-22-3-193-203
Scroll to:
Introduction. For the effective use of unmanned aerial vehicles (UAV), it is required to take into account the impact of atmospheric environmental factors. Based on the existing level of development of the research and methodological apparatus, it is impossible to determine the probability of damage to the UAV under the conditions of complex exposure to atmospheric environmental factors and to assess the feasibility of further performance of the flight task. Violation of the UAV operation process is caused by the influence of atmospheric precipitation, wind and temperature conditions of the environment. The work aims at the development of a methodology for determining the probability of damage to UAV as a result of exposure to atmospheric environmental factors, as well as to evaluate the performance of the software package implementing the developed algorithm using triangular, trapezoidal, pentagonal, and Gaussian membership functions.
Materials and Methods. A technique is proposed that makes it possible, using the theory of fuzzy logic, to determine the probability of damage to the UAV with inaccuracies and uncertainties in the description of atmospheric effects of the environment. It takes into account possible atmospheric forcing and enables to determine the probability of damage to the UAV under various atmospheric influences. The computational complexity of the algorithm implementing the technique depends significantly on the number of qualitative assessments of atmospheric impacts on UAV.
Results. A method for determining the probability of damage to UAV as a result of exposure to atmospheric environmental factors based on fuzzy sets (triangular, trapezoidal, pentagonal, Gaussian) was proposed and tested. The use of fuzzy sets for estimating the conditions of the UAV application environment was described. An algorithm was developed to determine the probability of damage to the UAV as a result of exposure to atmospheric environmental factors. A computational experiment was carried out to determine the complexity of calculating the probability of UAV damage as a result of atmospheric forcing under various environmental conditions: «moderate conditions» at a wind speed of 3 m/s, precipitation intensity of 0.8 mm/h, and air temperature of 5 °C; «very heavy conditions» of the external environment at a wind speed of 12 m/s, precipitation intensity 3.5 mm/h, and air temperature of –6 ºС. It was established that the use of triangular membership functions to calculate the probability of damage to the UAV as a result of atmospheric forcing provided higher performance compared to the rest ones (trapezoidal, pentagonal, Gaussian).
Discussion and Conclusions. The values of the UAV damage probabilities obtained during the implementation of the methodology under atmospheric environmental influences can be used at the pre-flight preparation stage and during the flight to assess the feasibility of further performance of the flight task. Based on the analysis of the application of the considered forms of membership functions, recommendations for their application are given. The use of algorithms with triangular membership functions will provide high performance of UAV control systems (UAV CS).
Belonozhko D.G., Korolev I.D., Chernyshev Yu.O., Ventsov N.N. Methodology for Determining the Probability of Damage to UAV as a Result of Exposure to Atmospheric Environmental Factors. Advanced Engineering Research (Rostov-on-Don). 2022;22(3):193-203. https://doi.org/10.23947/2687-1653-2022-22-3-193-203
Introduction. The analysis of the experience in using UAV has shown that it is critical to increase the effectiveness of UAV under the conditions of environmental influences [1–4]. The equipment of modern unmanned aerial vehicles makes it possible to measure and assess the condition of technical systems, flight parameters, and the external environment [2].
With the rapid updating of current flight information and its large volume, the implementation of management faces the problem of providing the stable functioning of the UAV under the influence of the external environment. It is worth noting that human abilities are limited, and in a rapidly changing environment, a number of parameters of the UAV and the external environment, such as temperature and engine speed, wind speed and precipitation intensity, due to limited human capabilities, may not be taken into account or overlooked. Such control inaccuracies can cause the failure of the UAV equipment or its damage [3]. The influence of environmental factors on the UAV can significantly reduce the quality of the task, and for certain values of the parameters of external influences, completely exclude the possibility of using the UAV [4].
In this regard, solving problems related to maintaining the effective functioning of UAV under various atmospheric conditions is an important step in drawing up requirements for on-board UAV equipment that ensures flight safety in emergency situations arising under the influence of various weather phenomena [4].
Materials and Methods. The authors see a solution to the problem in automating the process of assessing the parameters of the external environment to determine the probability of damage to the UAV and in developing control corresponding to the current situation. In papers [1–5], meteorological conditions, specifically, precipitation, wind loads, temperature, air pressure and humidity, are considered as destabilizing effects of the external environment. To describe the atmospheric effects of the external environment1, a probabilistic model is used in combination with the theory of random processes. A method is also known for estimating the intensity of precipitation and the water content of clouds based on remote measurement data2. The authors also note that the natural variability and stochastic nature of atmospheric conditions do not enable to establish strict mathematical dependences for describing atmospheric conditions of the environment.
With the uncertainty of parameters and incomplete information about the state of the external environment, it is not always possible to present its unintended impact in the form of clear values. This problem can be solved using fuzzy set theory. In the case of its application, there is no need to know the exact mathematical model of atmospheric effects of the external environment to assess its impact on the UAV3. Assessment of the operating conditions of complex systems is one of the areas where fuzzy sets are widely used to eliminate the inaccurate nature of environmental influences [6].
Thus, the analysis of well-known research in this area3. shows that in automated forecasting and decision support systems under conditions of lack and uncertainty of the initial information for its processing, fuzzy logic methods have proven themselves well.
Research Results
Development of methodology for determining the probability of damage to UAV as a result of exposure to atmospheric environmental factors
In [6], a feature is noted that distinguishes the intelligent automatic control system from the one built according to the “customary” scheme. It is associated with the use of knowledge processing mechanisms to perform the required functions under uncertain (or incompletely specified) conditions with the random nature of external disturbances. Intellectualization of the UAV operation process to account for uncertainty factors can be achieved through the use of a knowledge base and an inference engine [6].
To determine the value of the probability of damage to UAV as a result of environmental factors, it is required:
The functional diagram of the technique is shown in Figure 1.
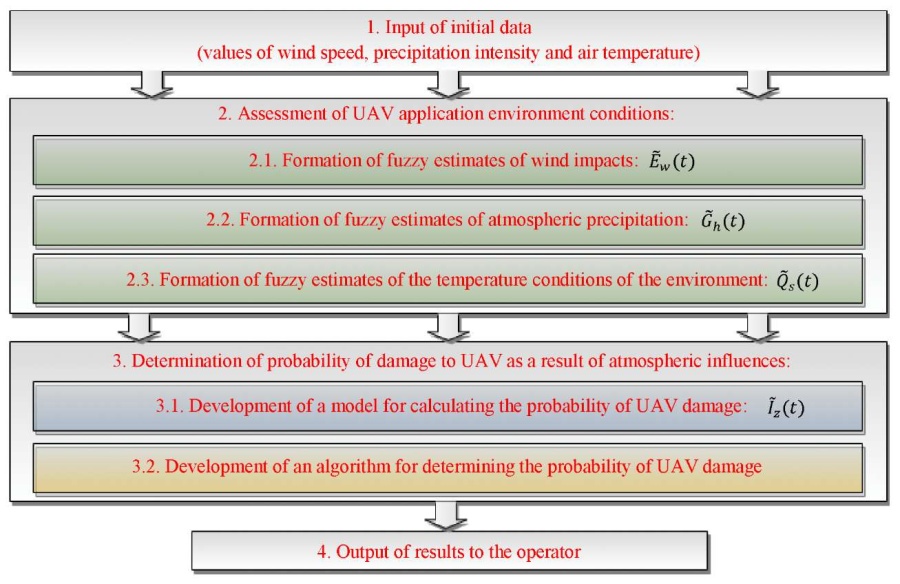
Fig. 1. Functional diagram of the methodology for determining the probability of damage to UAV as a result of exposure to atmospheric environmental factors
It is required to determine the probability of damage to UAV based on the analysis of the input fuzzy situation. Let us consider in detail the stages of the proposed methodology.
Assessment of UAV application environment conditions
Atmospheric environmental factors (wind, precipitation, and air temperature) may change during the flight. The dynamic change of the environment parameters has a significant impact on the stability of the UAV operation [7]. A short-range UAV made according to the aerodynamic scheme of an airplane type with flight speeds in the range from 20 to 60 m/s is considered as a typical one. Icing of the surfaces of such UAV can cause a change in its mass, as well as aerodynamic characteristics. The wind speed can vary depending on altitude and flight time. It has a significant impact on the UAV of the class under consideration [8]. For this reason, it is reasonable to assess atmospheric impacts on the basis of dynamic fuzzy approaches. The initial data for the functional model are the environmental conditions: wind speed 𝑒, precipitation intensity 𝑔, and air temperature 𝑡.
To estimate the effect of the wind acting on the UAV at time t, we introduce a set of triangular fuzzy numbers:
 (1)
(1)
where 𝐸(𝑡) — a set of triangular fuzzy numbers describing the correspondence of the current wind speed 𝑒 to fuzzy estimates of wind effects on UAV at time t;  — a triangular fuzzy number describing the correspondence of the current wind speed 𝑒 to a fuzzy estimate of wind impacts on UAV at time t;
— a triangular fuzzy number describing the correspondence of the current wind speed 𝑒 to a fuzzy estimate of wind impacts on UAV at time t;  .
.
In accordance with the concept of a fuzzy set, triangular fuzzy number  can be understood as [9][10]:
can be understood as [9][10]:
 (2)
(2)
where  — membership function of the wind speed 𝑒 to the assessment of the wind influence on the UAV.
— membership function of the wind speed 𝑒 to the assessment of the wind influence on the UAV.
Within the framework of the developed model, the qualitative assessment of the wind effect on the UAV depends only on its speed, i.e., possible inhomogeneities of the wind flow and its direction are not taken into account.
The membership function of triangular fuzzy number  can be represented by a tuple of three elements:
can be represented by a tuple of three elements:
 (3)
(3)
where  — clear value of wind speed that most accurately corresponds to the qualitative assessment of the wind influence on the UAV at time t;
— clear value of wind speed that most accurately corresponds to the qualitative assessment of the wind influence on the UAV at time t;  and
and  — clear values of wind speed in the least nonzero degree corresponding to the qualitative assessment of the wind influence on the UAV at time t. Values
— clear values of wind speed in the least nonzero degree corresponding to the qualitative assessment of the wind influence on the UAV at time t. Values  and
and  determine the fuzziness of estimate . If
determine the fuzziness of estimate . If  , then the estimate becomes clear.
, then the estimate becomes clear.
Specifically,  may mean an insignificant assessment of the wind impact on the UAV. If experts decide that the maximum wind speed at which its impact on the UAV under the current flight conditions at time t can be interpreted as insignificant 0.8 m/s, then the fuzzy number membership function will take the form
may mean an insignificant assessment of the wind impact on the UAV. If experts decide that the maximum wind speed at which its impact on the UAV under the current flight conditions at time t can be interpreted as insignificant 0.8 m/s, then the fuzzy number membership function will take the form  . Since the first and second elements of the tuple are equal to zero, the region of nonzero membership is located on a closed interval [0, 0.8]. To determine the degree of membership
. Since the first and second elements of the tuple are equal to zero, the region of nonzero membership is located on a closed interval [0, 0.8]. To determine the degree of membership  of the wind effect at a speed of e to the fuzzy assessment of the impact
of the wind effect at a speed of e to the fuzzy assessment of the impact  , it is required to substitute e into the equation of a straight line passing through the points (0;1) and (0.8;0).
, it is required to substitute e into the equation of a straight line passing through the points (0;1) and (0.8;0).
During the flight, UAV can determine the actual wind speed offline. Based on the values of tuples of three elements set by experts, by analogy with the above example, we formulate possible estimates of the influence of wind on the UAV. For this, the values of the triangular membership functions of the fuzzy sets from the values of the wind speed e are represented by graphs (Fig. 2):
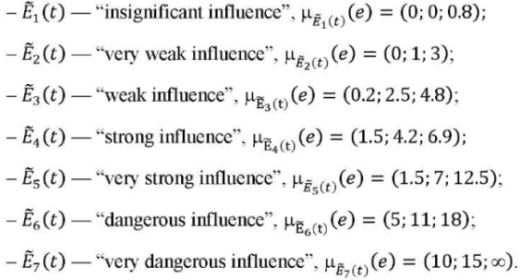
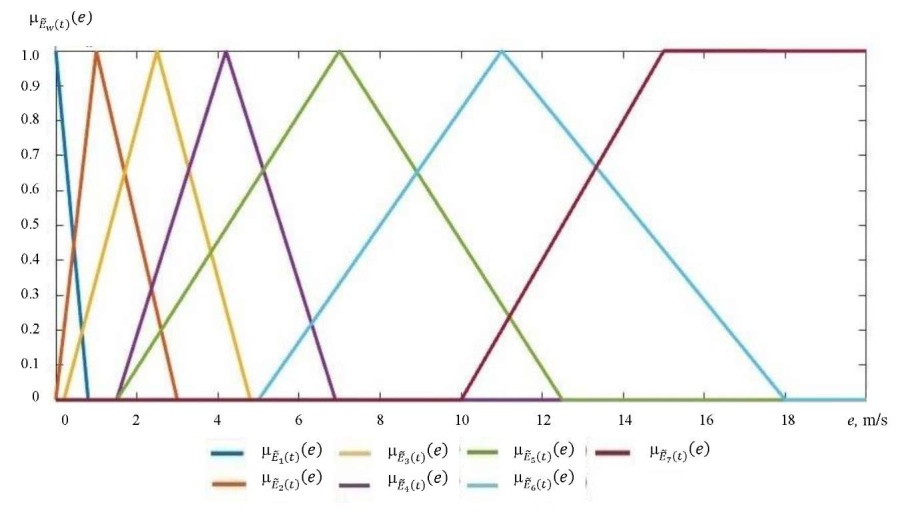
Fig. 2. Graphs of dependences of triangular membership functions of fuzzy sets Ẽ𝑤(𝑡) on the values of wind speed e
By analogy with the assessment of the influence of wind, we consider estimates of the influence of precipitation and temperature affecting the UAV at time t.
To assess the influence of precipitation, we introduce a set of triangular fuzzy numbers:
 (4)
(4)
where 𝐺(𝑡) — a set of triangular fuzzy numbers describing the correspondence of the current precipitation intensity 𝑔 to fuzzy estimates of the effects of precipitation on UAVs at time t;  — triangular fuzzy number describing the correspondence of the current precipitation intensity 𝑔 to a fuzzy estimate of the effects of precipitation on UAV at time t;
— triangular fuzzy number describing the correspondence of the current precipitation intensity 𝑔 to a fuzzy estimate of the effects of precipitation on UAV at time t; 
To assess the effect of temperature, we introduce a set of triangular fuzzy numbers:
 (5)
(5)
where Q(𝑡) — a set of triangular fuzzy numbers describing the correspondence of the current temperature q to fuzzy estimates of the effects of temperature on the UAV at time t;  — triangular fuzzy number describing the correspondence of the current temperature q to a fuzzy estimate of the temperature effects on the UAV at time t;
— triangular fuzzy number describing the correspondence of the current temperature q to a fuzzy estimate of the temperature effects on the UAV at time t; 
In the developed model, the influence of weather conditions is estimated based on three sets 𝐸(𝑡), 𝐺(𝑡), и 𝑄(𝑡). The elements of these sets correspond to triangular membership functions, which simplifies the adaptation of the model. To adjust the membership function, it is only required to change the values of atmospheric exposure that correspond to the greatest and/or least extent to the adaptable fuzzy estimate.
Algorithm for determining the probability of UAV damage as a result of exposure to atmospheric environmental factors
To implement the methodology, an algorithm has been developed to determine the probability of damage to UAV as a result of exposure to atmospheric environmental factors. The algorithm enables, under conditions of uncertainty, to take into account the influence of atmospheric environmental factors to calculate the probability of damage to UAV according to the current situation. The initial data for the algorithm are fuzzy sets 
Figure 3 shows its block diagram.
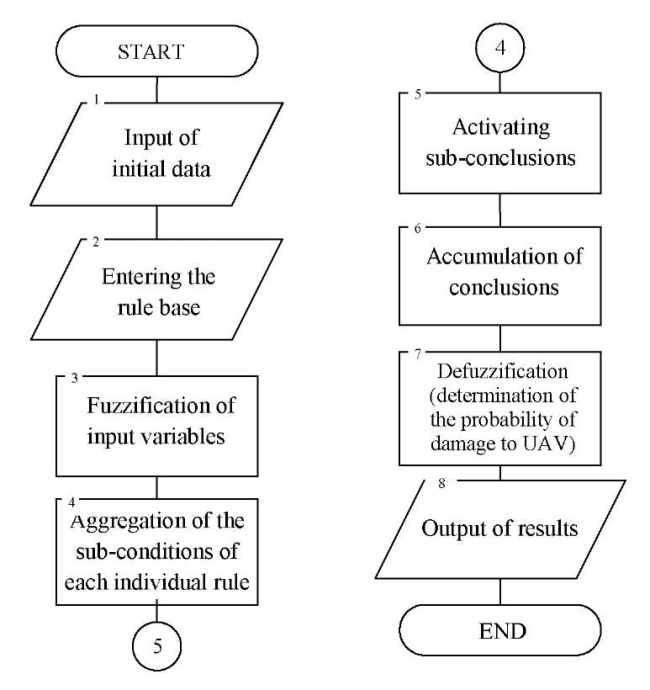
Fig. 3. Block diagram of the algorithm for determining the probability of damage to UAV as a result of exposure to atmospheric environmental factors
Determination of the probability of UAV damage as a result of atmospheric environmental influences
Papers [4][5] note the natural variability and stochastic nature of atmospheric conditions. Due to the fact that the atmospheric effects of the external environment are dynamic, it is reasonable to take this circumstance into account when constructing a model for determining the probability of damage (equipment failure) of UAV. We introduce a set of triangular fuzzy numbers:
 (6)
(6)
where I(𝑡) — a set of triangular fuzzy numbers describing the correspondence of the current value of the probability of damage to UAV 𝑃АВ at time t;  — triangular fuzzy number describing the correspondence of the current value of the probability of damage to the UAV 𝑃АВ to a fuzzy assessment of the level of exposure to atmospheric environmental factors on UAV at time t;
— triangular fuzzy number describing the correspondence of the current value of the probability of damage to the UAV 𝑃АВ to a fuzzy assessment of the level of exposure to atmospheric environmental factors on UAV at time t;  .
.
With regard to the UAV performance levels [11] (operable, limited operable, and inoperable condition), consider the following UAV damage probabilities:  — “low” (approximately 0.2),
— “low” (approximately 0.2),  — “medium” (approximately 0.5) and
— “medium” (approximately 0.5) and  — “high” (approximately 0.8). Triangular fuzzy number is represented as [9][10]:
— “high” (approximately 0.8). Triangular fuzzy number is represented as [9][10]:
 (7)
(7)
where  — the membership function of the probability of damage to UAV 𝑃АВ to the assessment of impact of the wind on the UAV.
— the membership function of the probability of damage to UAV 𝑃АВ to the assessment of impact of the wind on the UAV.
Given that the model under consideration has a dynamic character, the compilation of the fuzzy inference rule base should be preceded by a study of the influence of atmospheric conditions on the probability of damage to UAV. To that end, a series of experiments were conducted under various environmental conditions. Based on expert assessments of statistical data, a database of fuzzy inference rules was formed [10]. The rules for determining qualitative estimates of the probability of damage to UAV as a result of atmospheric influences of the external environment were formalized using fuzzy sets as follows:
 (8)
(8)
That is, under simultaneous conditions of minimally sufficient membership:
 ;
; ;
; , the fuzzy assessment of probability becomes relevant.
, the fuzzy assessment of probability becomes relevant.To obtain clear value  of the probability of damage to UAV as a result of atmospheric influences of the external environment at time t, it is required to defuzzify the corresponding fuzzy result according to formula [10]:
of the probability of damage to UAV as a result of atmospheric influences of the external environment at time t, it is required to defuzzify the corresponding fuzzy result according to formula [10]:
 (9)
(9)
where  — the resulting membership function of fuzzy set
— the resulting membership function of fuzzy set  , representing the general conclusion (conclusion) from all the rules (8);
, representing the general conclusion (conclusion) from all the rules (8);  — the output variable of the fuzzy inference, characterizing the fuzzy value of the probability of damage to the UAV as a result of atmospheric environmental influences.
— the output variable of the fuzzy inference, characterizing the fuzzy value of the probability of damage to the UAV as a result of atmospheric environmental influences.
Thus, the intellectualization of the functioning process is achieved through the use of a knowledge base and an inference engine, and provides that uncertainties are taken into account [6].
Scheme of the UAV operation process under environmental conditions
To calculate the probability of damage to UAV as a result of atmospheric environmental influences, it is required to implement fuzzy inference. It consists in the sequential execution of aggregation, activation and accumulation operations [10]. The scheme of the UAV operation process under environmental conditions is shown in Figure 4.
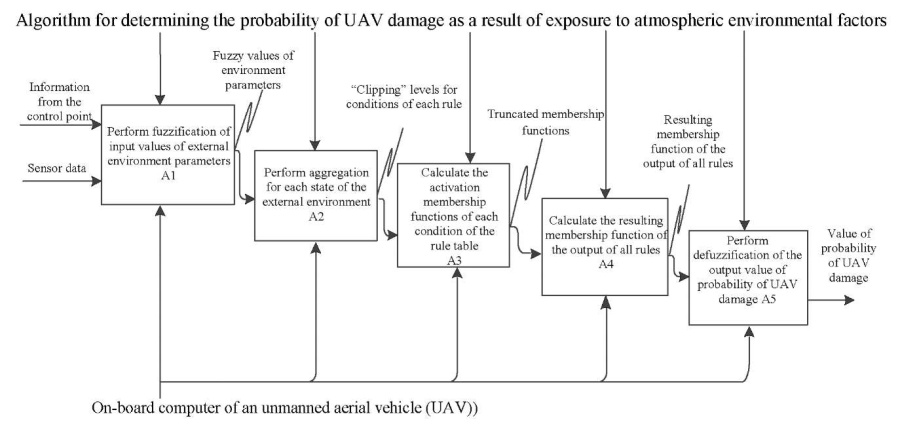
Fig. 4. Scheme of the UAV operation process under the influence of atmospheric environmental factors
Computational experiment
In [12], an analysis of foreign periodical literature in recent years has been carried out to identify formal approaches to dealing with uncertainties. The conclusion was made about the expediency of using n-angle numbers to determine the accuracy of the uncertainty formalization. Thus, when using the triangular representation of fuzzy numbers [10], each initial fuzzy number is described by three scalar values, which greatly simplifies the computational process.
In many cases, triangular and trapezoidal representations of fuzzy numbers are insufficient. If it is required to consider more complex influence of uncertainties, specifically, due to the greater exposure of the equipment installed on UAV to precipitation, it is reasonable to use more complex forms of membership functions [12][13]. Therefore, in [13], pentagonal fuzzy numbers, which reflect uncertainties much more accurately, were studied as an alternative.
Let us consider the basic, most used membership functions for the representation of fuzzy linguistic terms: Gaussian, triangular, trapezoidal [10], and pentagonal fuzzy numbers [13][14].
Based on the analysis of papers [13][14], we present the pentagonal membership function of elements to fuzzy sets of wind load effects  in the form of a tuple:
in the form of a tuple:
 (10)
(10)
where  — clear value of the wind speed most accurately corresponding to the qualitative assessment
— clear value of the wind speed most accurately corresponding to the qualitative assessment
of the wind impact on UAV at time t;  — clear values of wind speed in the smallest (nonzero) degree corresponding to qualitative assessment of the wind impact on UAV at time t;
— clear values of wind speed in the smallest (nonzero) degree corresponding to qualitative assessment of the wind impact on UAV at time t;  — clear wind speed values with α degree (nonzero), corresponding to qualitative assessment of the wind impact on UAV at time t. Values
— clear wind speed values with α degree (nonzero), corresponding to qualitative assessment of the wind impact on UAV at time t. Values  determine the fuzziness of assessment . In case, if
determine the fuzziness of assessment . In case, if  , we get a triangular fuzzy number. By changing the values of α level, we obtain a different form of the pentagonal membership function (Fig. 5).
, we get a triangular fuzzy number. By changing the values of α level, we obtain a different form of the pentagonal membership function (Fig. 5).
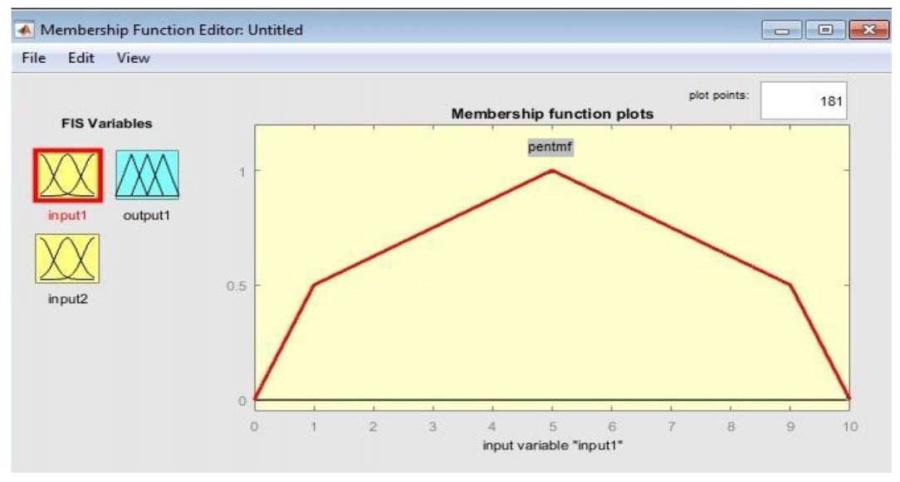
Fig. 5. Pentagonal membership function in MATLAB software environment
To study the pentagonal membership function in a software environment, it is required to describe it in the form of a program code. When implementing the algorithms4, 5, a custom pentagonal membership function was developed in the Fuzzy Logic Toolbox application package of the MATLAB software environment. This tool provides exploring mathematical models and algorithms based on the application of fuzzy logic theory.
To assess the accuracy of uncertainty when working with the described membership functions, it is required to conduct a computational experiment. It is reasonable to carry out the comparison on the same set of source data. The values of the probability of UAV damage as a result of atmospheric influences are calculated under “moderate conditions” (actual values: wind speed 3 m/s, precipitation intensity 0.8 mm/h, air temperature 5 °C) and “very difficult conditions” (actual values: wind speed 12 m/s, precipitation intensity 3.5 mm/h, air temperature – 6 °C) of the external environment.
Using MATLAB tools, the performance of the software package implementing the developed algorithm4 was evaluated depending on the form of the membership function used. An IBM-compatible PC with minimal system requirements (P4 – 2.500 MHz, 2.048 Mb RAM, Windows operating system) was used to conduct the computational experiment. Triangular, trapezoidal, pentagonal and Gaussian membership functions were evaluated. The results are presented in Table 1.
Table 1
Average operating time of the software package
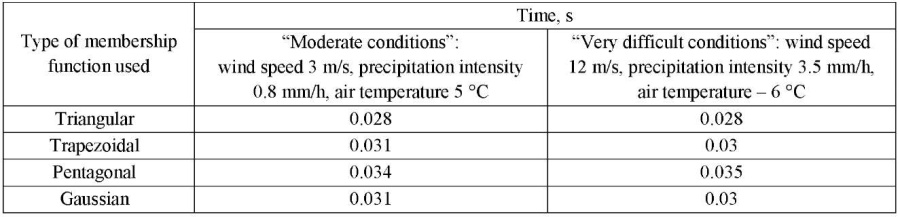
From Table 1, it can be concluded that a computer program based on the use of triangular membership functions has a higher speed in comparison to the others.
A promising area of research is studying the influence of the form of the membership function on the accuracy of calculations of the probability of damage to UAV under the uncertainty of the impact of atmospheric factors of the environment on the functioning of UAV.
Discussion and Conclusions. A method has been developed for determining the probability of damage to UAV as a result of exposure to atmospheric environmental factors, based on the mathematical apparatus of fuzzy sets. Fuzzy qualitative estimates made it possible to significantly expand traditional mathematical modeling techniques that require accurate information about input quantities. The use of this technique provided assessing the probability of UAV damage when the outcomes of alternatives were not known accurately and the probabilities of their occurrence were estimated using membership functions. The obtained values of the probabilities of UAV damage as a result of atmospheric influences of the external environment can be used at the stage of pre-flight preparation and during the flight to assess the feasibility of further performance of the flight task.
With the help of a software package implementing this technique, the values of the probability of damage to UAV under “moderate conditions” and “very difficult conditions” of the external environment were obtained. According to the results of the analysis of the application of these forms of membership functions and the computational experiment, the high performance of the software package using the triangular method of formalization of fuzzy sets was validated. A significant advantage of triangular membership functions is that their definition requires the least amount of information compared to other functions.
Thus, it is reasonable to apply algorithms using triangular membership functions in the onboard computers of the UAV CS to assess the atmospheric parameters of the environment. This will provide high performance of the UAV CS under conditions of using computers with low performance.
1. Kuznetcov IE, KuznetcovAA, Baklanov IO, et al. The Stochastic Model of Search and Detection of Ground Objects Using Unmanned Aerial Vehicles under Conditions of Irregular Influence of the Environment. In: Proc. VI Int. Conf. and Youth School “Information Technologies and Nanotechnologies (ITNT-2020)”. In 4 vol. VA Sobolev, ed. Samara: Samara National Research University; 2020. P. 152–156.
2. Kuznetsov DV, Bulgin DV. Metodika otsenki intensivnosti osadkov i vodnosti oblakov na osnove dannykh distantsionnykh izmerenii. In: Proc. XXI Int. Research-Methods.Conf. “Informatics: Problems, Methods, Technologies”, 11-12 Feb., 2021. Voronezh: Obshchestvo s ogranichennoi otvetstvennost'yu “Vehlborn”; 2021. P. 420–426. (In Russ.).
3. Cherepanov IE, Kuznetsov DV. Model' prognozirovaniya stepeni slozhnosti meteouslovii s uchetom teorii nechetkoi logiki. In: Proc. XXI Int. Research-Methods.Conf. “Informatics: Problems, Methods, Technologies”, 11-12 Feb., 2021. Voronezh: Obshchestvo s ogranichennoi otvetstvennost'yu “Vehlborn”; 2021. P. 659–663. (In Russ.)
4. Belonozhko DG, Korolev ID, Chernyshev Yu.O. Certificate of State Registration of Computer Program No. 2022613419, Russian Federation. Software Package for Evaluating the Accuracy of Uncertainty and Performance of Fuzzy Algorithms for Controlling an Unmanned Aerial Vehicle, no. 2022613002; 2022. (In Russ.)
5. Belonozhko DG, Korolev ID, Chernyshev Yu.O. Certificate of State Registration of Computer Program No. 2022613691, Russian Federation. Software Package for Intelligent Control of an Unmanned Aerial Vehicle under Conditions of Destructive Impacts Based on Pentagonal Accessory Functions, no. 2022613009; 2022. (In Russ.)
1. Fractional Order PID-Based Adaptive Fault-Tolerant Cooperative Control of Networked Unmanned Aerial Vehicles against Actuator Faults and Wind Effects with Hardware-in-the-Loop Experimental Validation / Ziquan Yu, Youmin Zhang, Bin Jiang, [et al.] // Control Engineering Practice. — 2021. — Vol. 114. — Art. 104861. http://dx.doi.org/10.1016/j.conengprac.2021.104861
2. Веселов, Г. Е. Синергетический синтез закона управления БПЛА в условиях ветровых возмущений с входными ограничениями / Г. Е. Веселов, И. А. Ингабире Алин // Известия ЮФУ. Технические науки. — 2020. — № 2 (212). — С. 101–112. https://doi.org/10.18522/2311-3103-2020-2-101-112
3. Adaptive Super-Twisting Trajectory Tracking Control for an Unmanned Aerial Vehicle under Gust Winds / Lei Cui, Ruizhi Zhang, Hongjiu Yang, Zhiqiang Zuo // Aerospace Science and Technology. — 2021. — Vol. 115. — Art. 106833. http://dx.doi.org/10.1016/j.ast.2021.106833
4. Методика учета влияния метеорологических факторов на эффективность применения беспилотных летательных аппаратов на основе системного анализа / И. Е. Кузнецов, А. В. Мельников, Е. А. Рогозин, О. В. Страшко // Вестник Дагестанского государственного технического университета. Технические науки. — 2018. — Т. 45, № 2. — С. 125–139. https://doi.org/10.21822/2073-6185-2018-45-2-125-139
5. The Mathematical Model of Characteristics of the Convective Unstable Atmosphere Taking into Account Microphysical Processes in Clouds / I. E. Kuznetsov, O. V. Strashko, V. V. Dorofeev, D. V. Gotsev // Journal of Physics: Conference Series. — 2018. — P. 012170. https://doi.org/10.1088/1742-6596/1096/1/012170
6. Лохин, В. М. Повышение адаптивных свойств автономных роботов на базе интеллектуальных технологий / В. М. Лохин, С. В. Манько, М. П. Романов // Экстремальная робототехника. — 2015. — Т. 1, № 1. — С. 59–67.
7. Белоножко, Д. Г. Алгоритм обеспечения требуемого уровня устойчивости управления беспилотным летательным аппаратом в условиях противодействия / Д. Г. Белоножко // Программные продукты и системы. — 2022. — Т. 35, № 1. — С. 197–206.
8. Санько, А. А. Влияние ветра на систему угловой стабилизации беспилотного летательного аппарата / А. А. Санько, И. В. Рожков, А. А. Шейников // Crede Experto: транспорт, общество, образование, язык. — 2019. — № 1. — С. 41–51.
9. Zadeh, L. A. Fuzzy sets / L. A. Zadeh // Information and Control. — 1965. — Vol. 8. — Р. 338–353. https://doi.org/10.1016/S0019-9958(65)90241-X
10. Piegat, A. Fuzzy Modeling and Control / A. Piegat. — Springer, 2001. — 728 р. https://doi.org/10.1007/978-3-7908-1824-6
11. Селиванов, В. В. Влияние живучести на боевую и военно-экономическую эффективность военно-технических систем / В. В. Селиванов, Ю. Д. Ильин // Военная мысль. — 2021. — № 9. — URL: https://cyberleninka.ru/article/n/vliyanie-zhivuchesti-na-boevuyu-i-voenno-ekonomicheskuyu-effektivnost-voenno-tehnicheskih-sistem (дата обращения : 08.07.2022).
12. Существующие способы формализации нечеткостей в транспортных процессах / Ю. О. Чернышев, А. В. Требухин, П. А. Панасенко, Д. Г. Белоножко // Инженерный вестник Дона. — 2021. — № 7 (79). — С. 57–79.
13. Pathinathan, T. Reverse Order Triangular, Trapezoidal and Pentagonal Fuzzy Numbers / T. Pathinathan, K. Ponnivalavan // Annals of Pure and Applied Mathematics. — 2015. — Vol. 9. — P. 107–117.
14. The Pentagonal Fuzzy Number: Its Different Representations, Properties, Ranking, Defuzzification and Application in Game Problems / Avishek Chakraborty, Sankar Prasad Mondal, Shariful Alam [et al.] // Symmetry. — 2019. — Vol. 11. — P. 1–31. http://dx.doi.org/10.3390/sym11020248
4, ul. Krasina, Krasnodar
4, ul. Krasina, Krasnodar
1, Gagarin sq., Rostov-on-Don
1, Gagarin sq., Rostov-on-Don
Belonozhko D.G., Korolev I.D., Chernyshev Yu.O., Ventsov N.N. Methodology for Determining the Probability of Damage to UAV as a Result of Exposure to Atmospheric Environmental Factors. Advanced Engineering Research (Rostov-on-Don). 2022;22(3):193-203. https://doi.org/10.23947/2687-1653-2022-22-3-193-203




Advanced Engineering Research (Rostov-on-Don)
ISSN 2687-1653 (Online)
Contact with: Publisher / Editorial Office of the Journal
Publisher: Don State Technical University - DSTU, Rostov-on-Don, Russia - https://donstu.ru/en/
Editor-in-Chief: Alexey N. Beskopylny, Dr.Sci. (Eng.), Professor, Vice-Rector, Don State Technical University (Rostov-on-Don, Russia)
Don State Technical University
1, Gagarin Sq., Rostov-on-Don, 344003, Russia
tel.: +7 (863) 2738-372, e-mail: vestnik@donstu.ru
16+
Processing of personal data




































