




Contents
Scroll to:
https://doi.org/10.23947/2687-1653-2022-22-4-323-330
Scroll to:
Introduction. The safety problem and the situation with accidents during the operation of elevator installations are elucidated. The role of elevator rope defects as a factor of dangerous incidents is indicated from the point of view of statistics. The malfunctions of the elevator mechanical equipment related to the defective indices of the ropes are listed. There is a difference in the documentary fixation of defective indices and rejection rates of ropes of lifting structures.
Materials and Methods. The well-known approaches to the control of ropes of lifting structures were described. It was emphasized that visual inspection control (VIC) was required to identify such rejection rates of steel elevator ropes as geometry change, corrosion and wear, wire breaks, temperature exposure, etc. The rejection rate was presented in the form of a mathematical system. The technical condition of elevator ropes during the operation was integrally assessed by the totality of identified defects at a fixed length. The decision to create a software and hardware complex (PAC) for the practical implementation of visual and measuring control was validated.
Results. The developed PAC VIC laboratory sample consisted of a hardware part, a video stream processing module, communicator for the server connectivity, specially designed software, and a client mobile application. PAC VIC implemented the following functions: – automatic detection and classification of the major significant rope defects based on a deep convolutional artificial neural network; – demonstration of a three-dimensional image of a rope and an image scanning algorithm with distortion compensation, according to which the metric characteristics of defects were fixed; – integral assessment of the technical condition of the rope according to the totality of detected defects; – color interpretation of the actual technical condition of the rope with subsequent transmission to the user's mobile device. Preliminary tests have shown the suitability of the PAC VIC for identifying defects. The reliability of the results for the identification and qualification of defects exceeded 80%. Work on deep learning of the system continues.
Discussion and Conclusions. PAC VIC of elevator ropes provides eliminating the risks of visual control caused by the psychophysical state of a person. It works remotely and contactless. The solution proposed by the authors automatically evaluates the rejection rates according to five criteria: external wire breaks, surface wear, rope diameter change, undulation, traces of temperature exposure. An important result of the VIC of steel ropes using computer vision and artificial intelligence is an increase in reliability and safety during the operation of elevator equipment.
Panfilov A.V., Yusupov A.R., Korotkiy A.A., Ivanov B.F. On the Control of the Technical Condition of Elevator Ropes Based on Artificial Intelligence and Computer Vision Technology. Advanced Engineering Research (Rostov-on-Don). 2022;22(4):323-330. https://doi.org/10.23947/2687-1653-2022-22-4-323-330
Introduction. Increased attention is paid to safety issues during the operation of elevator equipment1, 2, 3. About 500 thousand passenger, hospital and freight elevators are being used in the Russian Federation. According to the statistics of elevator accidents, their prime causes are insufficient quality of elevators and components, as well as improper maintenance and repair.
Analysis of elevator accidents has shown that about 30 % of incidents are directly or indirectly related to the technical condition of the ropes [1]. Extremely dangerous are defects, whose growth causes elevator car fall. Passenger elevator accidents, especially tragedies with victims, are very resonant events. Administrative4 and criminal5 liability is provided for violation of safety requirements during operation of elevators.
Timely and high-quality control of the technical condition of steel ropes provides preventing dangerous incidents [2–5].
Damage to the ropes occurs due to their poor quality and errors during installation. The consequence of incorrectly performed work may be unacceptable interaction with elements of the elevator equipment, including electrical ones.
Steel ropes can be considered an indicator of the technical condition of elevator equipment. Their defects signal the pulley groove wear, rope slip on a pulley (including due to excessive lubrication), skewed winch mounts, backlash in the elements of the drive gears, etc. Possible malfunctions of the elements of the mechanical part of the elevator, depending on the defective parameters of the ropes, are presented in Table 1.
Table 1
Malfunctions of the mechanical equipment of the elevator related to the rejection indicators of ropes
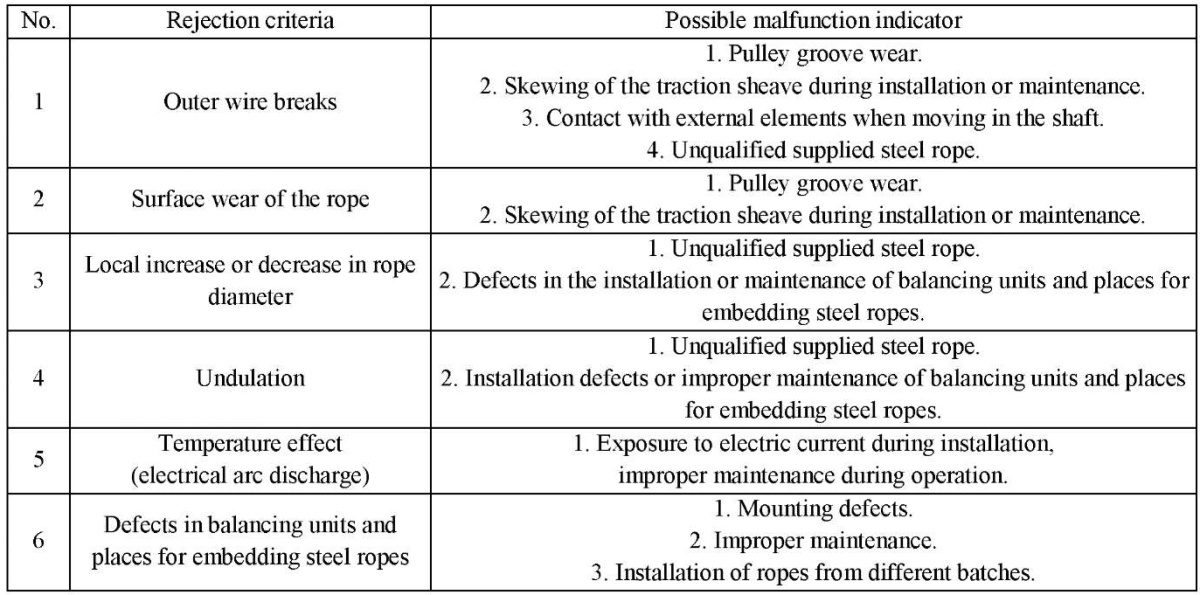
There is a significant difference in the rejection indicators and the standards for the rejection of ropes of various lifting structures6, 7 and elevators. In the latter case, the criteria are included in the operating manual of the specific elevator. This approach reduces the number of defect indicators, which, specifically, does not contribute to improving operational safety. In [1], the criteria and norms of rejection are given.
Materials and Methods. Ropes are products of deep processing of steel. If their safety margin is reduced to a critical value, operation is unacceptable.
The control of ropes of lifting structures by magnaflux method is widely known. It is used in the diagnosis of passenger cable cars, cargo cranes, lifters. This approach makes it possible to recognize internal defects invisible to the eye, measure the loss of the cross-sectional area of the rope, and detect local inconsistencies. As a rule, the method is used to control steel ropes with a diameter of more than 20 mm.
The average service life of elevator ropes is regulated and does not exceed five years. During this time, loading cycles do not cause loss of cross-sectional area and fatigue damage to the wires of the inner layers. For this reason, magnetic flaw detection is not used for elevator installations.
The most common method of assessing the technical condition of elevator ropes is visual inspection control (VIC)8. It provides assessing the technical condition of the operated elevator ropes, which are evaluated according to the following standards of rejection:
Here, t — current operating time of the elevator.
The rejection rate is understood as the value of Pi(t):
Pi(t) = Pio + Pi'(t). (1)
Here, Pio — scleronomous part, it does not depend on t and is associated with a single application of loads; Pi'(t) — rheonomic part, which accumulates in the process of elastoplastic cyclic deformation.
When assessing the technical condition of the rope during operation, the loss of its strength is calculated according to at least one of the rejection criteria:
Pi(t) ≤ [Pi], (2)
where i = 1/12.
Under the maintenance of passenger elevators, VIC of steel ropes is performed at intervals specified in the operations manual (as a rule, once a month).
VIC of steel ropes consists of two stages:
The quality of VIC under maintenance of steel ropes is associated with the physiological capabilities of human visual perception [4–6]. The elevator can have from three to twelve parallel ropes with a complex balancing system. The quantity depends on the height and load capacity. Health assessment of ropes, balancing units and sealing off involves working at height, under difficult conditions, in tight working space, in low light9. The possibilities of human vision are limited. It is known that after watching a moving steel rope for more than ten minutes, the eyes get tired and perceive the numerous rejection indicators worse. High-quality, objective control of elevator ropes requires automation of the process. Analysis of literature sources, accidents and incidents, has shown that it is reasonable to use solutions based on computer vision and artificial intelligence technologies for automation [5–10].
The authors set a goal to create a program apparatus complex (PAC) of VIC for the practical implementation of visual and measurement control based on computer vision and artificial intelligence technologies10.
Research Results. In elevators, defects in steel ropes and their attachments are automatically detected and identified using special means of photo and video recording. Machine vision and artificial intelligence process images of defects. An integral assessment of the types and parameters of the detected defects in the form of a color indication is transmitted to the mobile device. PAC VIC automates and combines two control methods: visual and instrumental.
The basic functions of the PAC VIC are listed below.
The complex consists of three elements.
Six IP cameras with a resolution of 640.480 are used to photograph sections of movable steel ropes. They are fixed in the housing installed in the elevator shaft. The number of cameras depends on the number of ropes on which the elevator car is suspended. The cameras are connected via a wired or wireless communication channel to a single-board computer that processes images and generates a batch message for forwarding to the server. A single-board computer generates a batch message. It is transmitted via an Ethernet cable or a wireless communication channel through a modem router to the server. The latter classifies defects, determines their number and metrological parameters, outputs an integral assessment of the technical condition of the rope, interprets it as a color indicator, and in this form transmits it to the user through a mobile application.
Figures 1–3 shows the PAC VIC modules for elevator installations, the functional diagram and the hardware component of the complex.

Fig. 1. PAC VIC modules (the authors' figure)

Fig. 2. PAC VIC functional diagram for detecting defects in steel ropes
and balancing units based on computer vision and artificial intelligence technologies:
1 — balancing unit; 2 — rope defects; 3 — IP-camera; 4 — GSM-modem;
5 — neurocomputing device; 6 — image in a mobile device (the authors' figure)
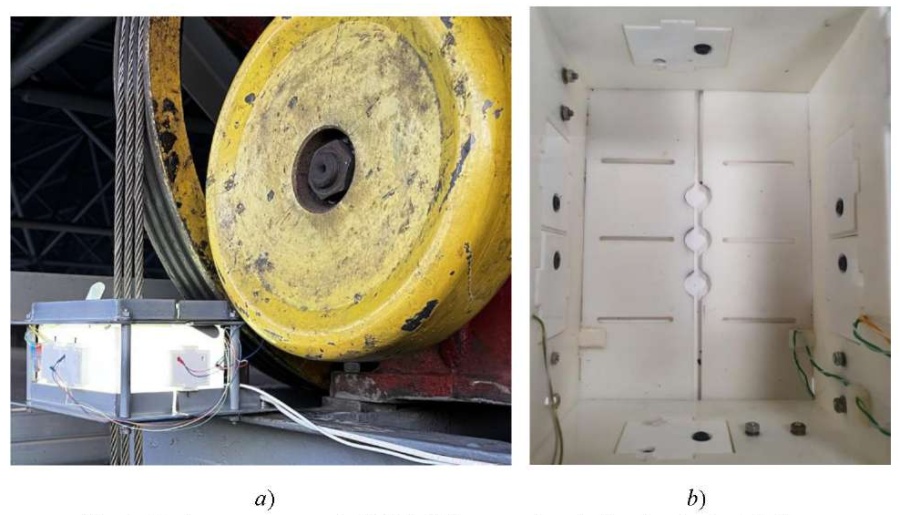
Fig. 3. Hardware component of PAC VIC:
a — place in the elevator installation,
b — installation points of six IP cameras (the authors' photo)
PAC VIC identifies and classifies primary defects of steel ropes, elevator installations and balancing units using computer vision:
The database contains photo and video images of typical defects of steel ropes and balancing units. The complex periodically or on request outputs a remote integrated assessment of the rejection indicators of ropes and defects of balancing units and transmits it to the user's mobile application.
The computational tool is used for an integral assessment of the technical condition of the steel rope and interpretation of the result using color (red, yellow, green). This makes it possible to integrate with sensors installed in elevator control and dispatch communication systems, as well as with the “Elevator Monitoring”11 online maintenance control program and the “Arpicon. Online”12 cloud service automation platform.
The proposed solution was previously tested on a laboratory elevator installation with three ropes with an organic core. Their characteristics correspond to GOST 3077-80:
Testing has shown the feasibility of the method for determining the defects listed above using the PAC VIC. The reliability of detection and qualification of defects exceeded 80%. To improve the results, the investigation on deep learning of the system continues, i.e., algorithms are being improved, the number and quality of datasets of images of typical defects of steel ropes and balancing units are increasing.
Discussion and Conclusions. Defects in the steel ropes may cause the elevator cab to fall. When maintaining elevators, visual control is not enough to fully assess the actual risks of accidents and incidents.
It is established that computer vision and artificial intelligence technologies can be used for an integral assessment of the technical condition of steel ropes, and this significantly increases the level of safety during the operation of elevator installations.
The PAC VIC of elevator ropes eliminates the risks associated with the psychophysical state of the person who determines the state of the system. Thus, it is possible to increase safety of the elevator equipment operation.
Advantages of the developed PAC VIC of elevator ropes are as follows:
Potential consumers of PAC VIC:
1. O poryadke obespecheniya bezopasnosti opasnykh ob"ektov v obshchestvennykh i zhilykh zdaniyakh: RF Government Decree of 24.06.2017, no. 743. URL: http://government.ru/docs/28241/ (accessed: 25.10.2022). (In Russ.)
2. GOST R 55964-2014. Lifts. General Safety Requirements in Service. URL: https://docs.cntd.ru/document/1200109313 (accessed: 25.10.2022). (In Russ.)
3. GOST R 54999-2012. Lifts. General Requirements for Maintenance Instruction. URL: https://docs.cntd.ru/document/1200096000 (accessed: 25.10.2022). (In Russ.)
4. Narushenie trebovanii promyshlennoi bezopasnosti ili uslovii litsenzii na osushchestvlenie vidov deyatel'nosti v oblasti promyshlennoi bezopasnosti opasnykh proizvodstvennykh ob"ektov. 9.1.1 Article of RF Administrative Code. URL: http://www.consultant.ru/document/cons_doc_LAW_34661/6db72644d55f955ad23b924b678184a5d027d99f/ (accessed: 25.10.2022). (In Russ.)
5. Proizvodstvo, khranenie, perevozka libo sbyt tovarov i produktsii, vypolnenie rabot ili okazanie uslug, ne otvechayushchikh trebovaniyam bezopasnosti. 238 Article of RF Criminal Code. URL: https://base.garant.ru/10108000/82fa894382554e9c56db483eff62c412/ (accessed: 25.10.2022). (In Russ.)
6. Ob utverzhdenii federal'nykh norm i pravil v oblasti promyshlennoi bezopasnosti “Pravila bezopasnosti opasnykh proizvodstvennykh ob"ektov, na kotorykh ispol'zuyutsya pod"emnye sooruzheniya”. Federal Service for Ecological, Technological and Atomic Inspection. URL: https://docs.cntd.ru/document/573275657 (accessed: 25.10.2022). (In Russ.)
7. Ob utverzhdenii federal'nykh norm i pravil v oblasti promyshlennoi bezopasnosti “Pravila bezopasnosti passazhirskikh kanatnykh dorog i funikulerov”. Federal Service for Ecological, Technological and Atomic Inspection. URL: https://docs.cntd.ru/document/573191373 (accessed: 25.10.2022). (In Russ.)
8. Possibilities to Improve Visual Wire Rope Inspection. O.I.T.A.F. Recommendations no. 30. International Organization for Transportation by Rope. URL: https://www.gosnadzor.gov.ru/industrial/equipment/cable%20cars%20and%20funiculars/method%20www.oitaf.org/ (accessed: 05.11.2022). (Transl. from Eng.)
9. Vallan A, Molinar F. A Vision-Based Technique for Lay Length Measurement of Metallic Wire Ropes. IEEE Transactions on Instrumentation and Measurement. 2009;5:1756–1762.
10. Korotkiy AA, et al. Method of Visual and Dimensional Control of a Steel Cable. RF Patent no. 2775348, 2022.
11. Rusanov SE. Computer program “Elevator Monitoring”. URL: https://lmonitor.ru (accessed: 29.10.2022). (In Russ.)
12. Arpicon. Online.“Center” LLC. URL: https://lift.arpicon.ru (accessed: 29.10.2022). (In Russ.)
1. Снижение риска возникновения и тяжести последствий несчастных случаев при авариях лифтов / А. В. Панфилов [и др.] // Научно-технический вестник Брянского государственного университета. — 2020. — № 3. — С. 451–460. doi: 10.22281/2413-9920-2020-06-03-451-460
2. РД РОСЭК 012–97. Канаты стальные. Контроль и нормы браковки / А. А. Короткий [и др.]. — Новочеркасск : РОСЭК, 1997. — 50 с.
3. Mouradi, H. Steel Wire Ropes Failure Analysis: Experimental Study / H. Mouradi, A. E. Barkany, A. E. Biyaali // Engineering Failure Analysis. — 2018. — Vol. 91. — P. 234–242. doi: 10.1016/j.engfailanal.2018.04.019
4. Deyst, J. P. Bounds on Least-Squares Four-Parameter Sine-Fit Errors due to Harmonic Distortion and Noise / J. P. Deyst, M. Sounders, O. M. Solomon // IEEE Transactions on Instrumentation and Measurement. — 1995. — Vol. 44. — P. 637–642. doi: 10.1109/19.387298
5. Soucup, D. Convolutional Neural Networks for Steel Surface Defect Detection from Photometric Stereo Images. In: Advances in Visual Computing. ISVC 2014. / D. Soukup, R. Huber-Mörk // Lecture Notes in Computer Science. — 2014. — Vol. 8887. — P. 668–677. doi: 10.1007/978-3-319-14249-4_64
6. Vallan, A. A Vision-Based Technique for Lay Length Measurement of Metallic Wire Ropes / A. Vallan, F. Molinar // IEEE Transactions on Instrumentation and Measurement. — 2009. — Vol. 58. — P. 1756–1762. doi: 10.1109/TIM.2009.2012953
7. On the Suitability of Different Features for Anomaly Detection in Wire Ropes. In: Computer Vision, Imaging and Computer Graphics: Theory and Applications. Ranchordas, A., et al. (eds.) / E.-S. Platzer, H. Süße, J. Nägele [et al.] // VISIGRAPP 2009 : Communications in Computer and Information Science. — 2009. — Vol. 68. — P. 296–308. doi: 10.1007/978-3-642-11840-1_22
8. One-Class Classification for Anomaly Detection in Wire Ropes with Gaussian Process in a Few Lines of Code / E. Rodner, E.-S. Wacker, M. Kemmler, J. Denzler // In: Proc. 12th IAPR Conference on Machine Vision Applications. — URL: https://www.researchgate.net/publication/232805478_OneClass_Classification_for_Anomaly_Detection_in_Wire_Ropes_with_Gaussian_Processes_in_a_Few_Lines_of_Code (accessed: 29. 09. 2022).
9. Surface Damage Detection for Steel Wire Ropes Using Deep Learning and Computer Vision Techniques / Xinyuan Huang, Zhiliang Liu, Xinyu Zhang [et al.] // Measurement. — 2020. — Vol. 161. — Art. 107843. doi: 10.1016/j.measurement.2020.107843
10. Evolution Properties of Tribological Parameters for Steel Wire Rope under Sliding Contact Conditions / Xiangdong Chang, Yuxing Peng, Sheng-Yong Zou, Zhen-Cai Zhu // Metals. — 2018. — Vol. 8. — P. 743. doi: 10.3390/met8100743
Alexey V. Panfilov
1, Gagarin Sq.
Rostov-on-Don
Alexander R. Yusupov
1, Gagarin Sq.
Rostov-on-Don
Anatoly A. Korotkiy
1, Gagarin Sq.
Rostov-on-Don
Boris F. Ivanov
1, Gagarin Sq.
Rostov-on-Don
Panfilov A.V., Yusupov A.R., Korotkiy A.A., Ivanov B.F. On the Control of the Technical Condition of Elevator Ropes Based on Artificial Intelligence and Computer Vision Technology. Advanced Engineering Research (Rostov-on-Don). 2022;22(4):323-330. https://doi.org/10.23947/2687-1653-2022-22-4-323-330




Advanced Engineering Research (Rostov-on-Don)
ISSN 2687-1653 (Online)
Contact with: Publisher / Editorial Office of the Journal
Publisher: Don State Technical University - DSTU, Rostov-on-Don, Russia - https://donstu.ru/en/
Editor-in-Chief: Alexey N. Beskopylny, Dr.Sci. (Eng.), Professor, Vice-Rector, Don State Technical University (Rostov-on-Don, Russia)
Don State Technical University
1, Gagarin Sq., Rostov-on-Don, 344003, Russia
tel.: +7 (863) 2738-372, e-mail: vestnik@donstu.ru
16+
Processing of personal data




































