




Содержание
Перейти к:
https://doi.org/10.23947/2687-1653-2022-22-3-204-213
Перейти к:
Введение. Исследуется задача управления движением экзоскелета нижних конечностей. Для ее решения предлагается задействовать программное управление и управление в виде обратной связи. Формирование управления в виде обратной связи требует оценки состояния экзоскелета (углы поворота, угловые скорости и ускорения звеньев). Рассматривается возможность применения блока инерциальных датчиков для оценки угловых скоростей и ускорений звеньев экзоскелета. Цель работы — определить законы формирования управления движением экзоскелета, которые обеспечат устойчивость программного движения и будут использовать измерения энкодеров, микромеханических гироскопов и акселерометров.
Материалы и методы. Ранее выполненное математическое моделирование динамики экзоскелета задействовали при формировании программного управления. Предложили оснастить экзоскелет блоками инерциальных датчиков. Это решение позволяет оценивать вектор состояния экзоскелета и использовать данные оценки в цепи обратной связи. Описали математическую модель измерений указанных датчиков. Предложенный вариант пригоден для систем управления трехзвенными экзоскелетами нижних конечностей и может быть расширен для многозвенных.
Результаты исследования. Предложены новые законы управления движением экзоскелета, основанные на математической модели динамики системы и использующие измерительную информацию с энкодеров и инерциальных датчиков. В математическом пакете Wolfram Mathematica выполнено численное моделирование движения экзоскелета. Его итоги подтвердили работоспособность предложенного управления и возможность использования блока инерциальных датчиков для оценки состояния экзоскелета. Приводятся результаты численного моделирования для следующих программных движений: подъем экзоскелета из положения сидя в вертикальное и стабилизация вертикального положения равновесия.
Обсуждение и заключения. Предлагаемое управление применимо в экзоскелетах для медицинских приложений (например, в задаче вертикализации пациентов с нарушениями функций опорно-двигательного аппарата). Показана возможность использования измерительной информации, полученной от блоков инерциальных датчиков, в задаче оценки состояния звеньев экзоскелета. Применение инерциальных датчиков позволит определять угловое ускорение звеньев экзоскелета, избегая численного дифференцирования измерительной информации, полученной от энкодеров. Оценки углового ускорения позволяют вводить в систему управления обратную связь по угловым ускорениям, что открывает возможность улучшить переходные процессы при управлении движением экзоскелета.
Сайпулаев Г.Р., Сайпулаев М.Р., Меркурьев И.В., Адамов Б.И., Гарсиа Р.Б. Применение блока инерциальных датчиков для оценивания положения и управления движением экзоскелета нижних конечностей. Advanced Engineering Research (Rostov-on-Don). 2022;22(3):204-213. https://doi.org/10.23947/2687-1653-2022-22-3-204-213
Saypulaev G.R., Saypulaev M.R., Merkuryev I.V., Adamov B.I., Garcia R.B. Application of an Inertial Sensor Unit for Position Estimation and Motion Control of the Lower-Extremity Powered Exoskeleton. Advanced Engineering Research (Rostov-on-Don). 2022;22(3):204-213. https://doi.org/10.23947/2687-1653-2022-22-3-204-213
Введение. Разработка и применение экзоскелетов — устройств, предназначенных для облегчения движения и повышения двигательной эффективности человека, — перспективное направление развития робототехники.
Экзоскелеты все шире применяются в промышленности [1], военном деле [2], медицине [3] и других областях. Этим обусловлена актуальность исследований, посвященных их схемотехническому и конструкционному исполнению, оптимизации энергозатрат, траектории движения, динамике, управлению.
В представленной работе рассматривается активный экзоскелет нижних конечностей человека с жесткой конструкцией силового каркаса. Его используют для реабилитации пациентов с нарушениями функций опорно-двигательного аппарата.
При разработке таких экзоскелетов возникает необходимость решения взаимосвязанных научно-технических задач. В их числе:
Все перечисленные задачи связывает проблема поиска управляющих воздействий для программного движения. Их источником может быть, во-первых, динамическая модель системы. Во-вторых, они формируются в виде пропорционального интегрально-дифференциального (ПИД) регулятора, используемого для стабилизации программного движения. Возможна также комбинация двух способов. При этом для формирования управления по принципу обратной связи (в частности в виде ПИД регулятора) важную роль играют алгоритмы оценивания состояния динамической системы и набор датчиков, показатели которых используются в алгоритмах.
Для получения информации о положении звеньев экзоскелетов их оснащают энкодером или гироскопом [9–14]. Другие возможные варианты: акселерометр, магнитометр, потенциометр, датчики момента, силы, биосигналов и др.
В [13] на каждом звене экзоскелета предлагается использовать по одному блоку инерциальных датчиков, состоящих из гироскопов и акселерометров. Такое решение позволит оценивать углы поворота, угловые скорости и ускорения. При этом модель измерений получается нелинейной, что усложняет структуру систем управления и наблюдения.
Цель работы — улучшение управления экзоскелетом за счет использования двух инерциальных блоков, закрепленных на каждом звене экзоскелета. Такой подход позволяет оценивать углы поворота, угловые скорости и ускорения экзоскелета. С помощью предлагаемого варианта расположения гироскопов и акселерометров можно получить линейную модель измерений, что откроет пути для упрощения системы управления и применения теории оптимального оценивания линейных систем [15]. Это, в свою очередь, станет базой для совершенствования управления движением экзоскелета. Критерий улучшения качества управления — уменьшение отклонений угловых скоростей звеньев от программного движения.
Материалы и методы. Рассмотрим кинематическую схему экзоскелета с жесткой конструкцией силового каркаса при симметричном движении ног в сагиттальной плоскости (рис. 1).
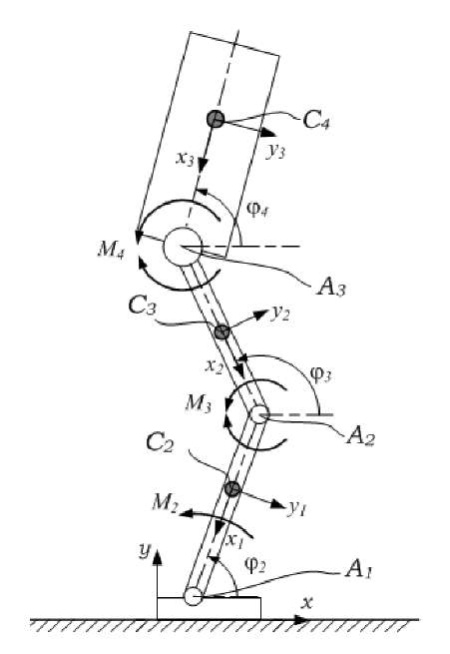
Рис. 1. Кинематическая схема экзоскелета нижних конечностей в сагиттальной плоскости
C2, C3, C4 — центры масс голеней, бедер и корпуса соответственно; А1, А2, А3 — шарниры, соединяющие звенья экзоскелета; φ2, φ3, φ4 — углы поворота звеньев экзоскелета; М2, М3, М4 — управляющие моменты, создаваемые приводами, расположенными в шарнирах А1, А2, А3 соответственно. Для описания движения вводится система координат xyz. Ось x направлена вдоль опорной поверхности, y — вдоль местной вертикали к опорной поверхности. Ось z дополняет координатные оси до правой декартовой системы координат.
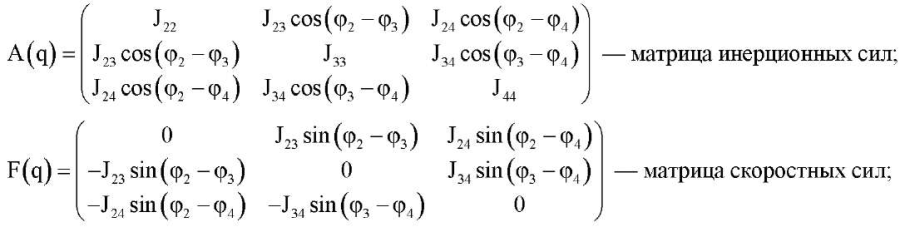
В качестве основы для построения системы управления движением экзоскелета используем динамическую модель из [6].
 (1)
(1)
Здесь:
 — диагональная матрица диссипативных сил, характеризующих линейное трение в шарнирах;
— диагональная матрица диссипативных сил, характеризующих линейное трение в шарнирах;
 — вектор-столбец моментов, возникающих от действия сил тяжести;
— вектор-столбец моментов, возникающих от действия сил тяжести;
 — вектор-столбец управляющих моментов, создаваемых приводами, которые расположены в шарнирах звеньев экзоскелета;
— вектор-столбец управляющих моментов, создаваемых приводами, которые расположены в шарнирах звеньев экзоскелета;
 — вектор-столбец обобщенных координат, состоящий из углов поворота звеньев экзоскелета;
— вектор-столбец обобщенных координат, состоящий из углов поворота звеньев экзоскелета;
 — моменты инерции звеньев экзоскелета;
— моменты инерции звеньев экзоскелета;
 — коэффициенты линейного трения в шарнирах звеньев экзоскелета;
— коэффициенты линейного трения в шарнирах звеньев экзоскелета;
 — максимальные величины моментов гравитационных сил, воспринимаемые выходными звеньями приводов.
— максимальные величины моментов гравитационных сил, воспринимаемые выходными звеньями приводов.
Пусть заданы законы изменения углов и их производные при программном движении:
 (2)
(2)
Для управления движением экзоскелета предлагается формировать управляющие воздействия в виде суммы управляющих моментов:
 ;
;
 (3)
(3)
Для программного управления значения управляющих воздействий MiP можно рассчитать по формулам [7]:
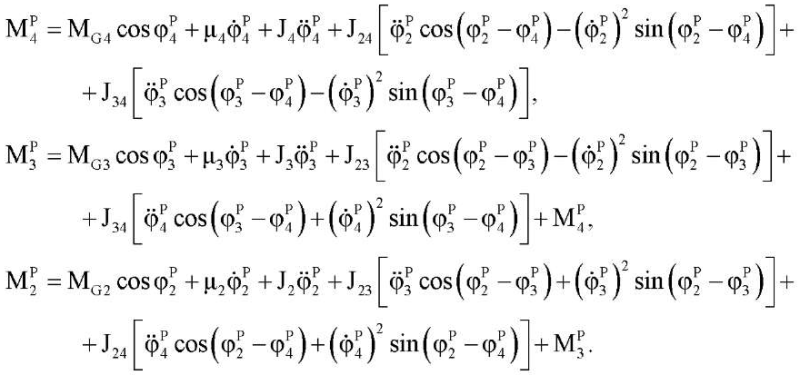 (4)
(4)
Величины MiPID вычисляются по принципу обратной связи (в форме ПИД регулятора):
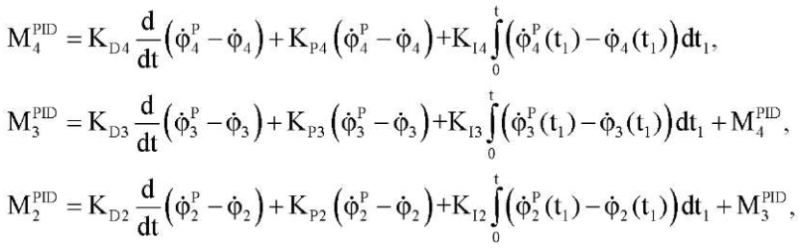 (5)
(5)
или
 (6)
(6)
Здесь коэффициенты ПИД регулятора KPi, Kit, KDi (i = 2, 3, 4) могут быть:
Одна из проблем формирования управляющих воздействий в виде ПИД регулятора — возможные погрешности при дифференцировании измерительной информации. Чтобы их избежать, используем:
 и ускорений
и ускорений  ).
).Модель измерений углов поворота с помощью энкодеров можно представить в виде:
 (7)
(7)
где φE2. φE3. φE4 — показания энкодеров, расположенных в шарнирах А1, А2, А3 (рис. 1).
Модель измерений угловых скоростей с помощью микромеханических гироскопов можно записать в виде:
 (8)
(8)
где ΩG2, ΩG3, ΩG4 — показания гироскопов, закрепленных на звеньях экзоскелета.
Для оценки угловых скоростей и ускорений с помощью акселерометров можно использовать по два двухосевых акселерометра, которые расположены на противоположных концах каждого из звеньев. Они измеряют в проекциях на оси xiyi (i = 1, 2, 3) кажущиеся ускорения, связанные с соответствующими звеньями.
 (9)
(9)
Здесь
 — векторы показаний двухосевых акселерометров, закрепленных на звене A1A2 и расположенных в точках A1 и A2 соответственно;
— векторы показаний двухосевых акселерометров, закрепленных на звене A1A2 и расположенных в точках A1 и A2 соответственно;
 — векторы показаний двухосевых акселерометров, закрепленных на звене A2A3 и расположенных в точках A2 и A3 соответственно;
— векторы показаний двухосевых акселерометров, закрепленных на звене A2A3 и расположенных в точках A2 и A3 соответственно;
 — векторы показаний двухосевых акселерометров, закрепленных на звене A3C и расположенных в точках A3 и C соответственно;
— векторы показаний двухосевых акселерометров, закрепленных на звене A3C и расположенных в точках A3 и C соответственно;
 — расстояния между парами акселерометров, закрепленных на звеньях A1A2, A2A3, и A3C соответственно.
— расстояния между парами акселерометров, закрепленных на звеньях A1A2, A2A3, и A3C соответственно.
Объединим уравнения (7)–(9) и запишем формулы для оценки углов поворота, угловых скоростей и ускорений:
 (10)
(10)
Для коррекции оценок модулей угловых скоростей можно использовать уравнения:
 (11)
(11)
Таким образом, для оценки углов поворота, угловых скоростей и угловых ускорений звеньев экзоскелета можно обработать измерения фильтром скользящего среднего, алгоритмом фильтра Калмана и др. [10][13][15].
В самом простом варианте замыкания цепи обратной связи при формировании управления получим выражения для управляющих моментов:
 (12)
(12)
Введение в систему управления обратной связи по угловым ускорениям позволяет применить диагонализацию матрицы инерционных сил для снижения перекрестного влияния между обобщенными координатами.
Смоделируем движения экзоскелета для проверки работоспособности предложенного закона управления. В качестве программного движения рассмотрим:
Результаты исследования. Для численного моделирования системы возьмем параметры математической модели экзоскелета из [6][7]. Рассмотрим частный случай, выбрав одинаковые коэффициенты ПИД регулятора для каждого привода:

На рис. 2 приведены зависимости от времени для углов поворота и угловых скоростей звеньев экзоскелета. Их получили при управляющих моментах, соответствующих подъему из положения сидя. Как видно из рис. 2 а, по окончании движения углы поворота каждого звена равны φ2 = φ3 = φ4 = 90°, что соответствует стоянию.
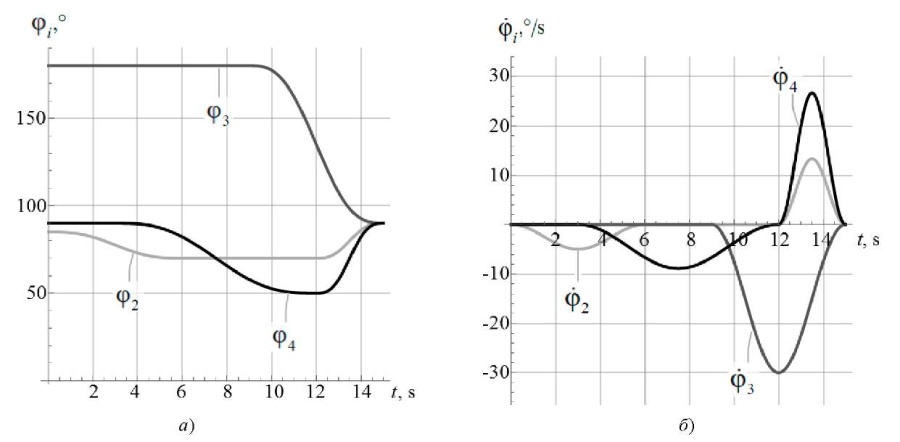
Рис. 2. Результаты моделирования подъема из положение сидя без начальных отклонений от программного движения в углах поворота звеньев экзоскелета: а — углы поворота звеньев; б — угловые скорости звеньев
Теперь рассмотрим случай с отклонениями около 20° в углах поворота звеньев по сравнению с начальным положением, заданным в программном движении. Результаты моделирования подъема из положения сидя приведены на рис. 3. Как и на рис. 2, по окончании времени движения значения углов поворота равны φ2 = φ3 = φ4 = 90°. Следовательно, использование комбинации программного управления и управления в виде ПИД регулятора точно приводит экзоскелет к требуемому положению.
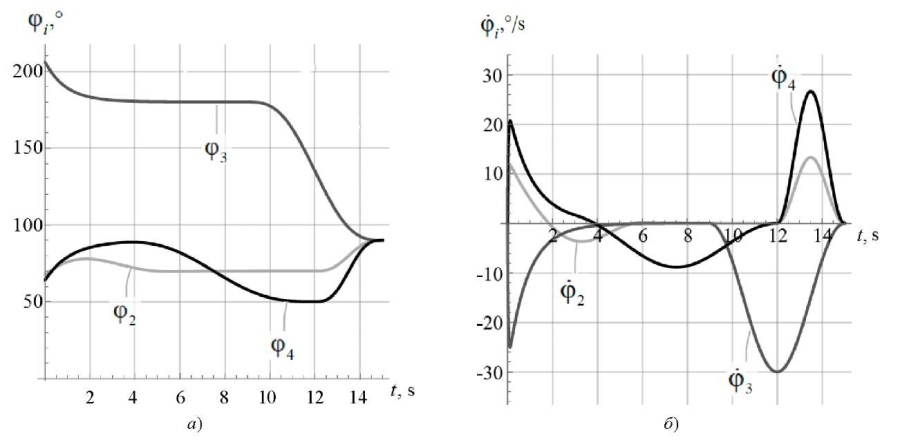
Рис. 3. Результаты моделирования подъема из положения сидя при начальных отклонениях от программного движения в углах поворота звеньев экзоскелета: а — углы поворота звеньев; б — угловые скорости звеньев
Таким образом, при моделировании программного движения показана работоспособность предложенного закона формирования управляющих воздействий, описанного в (4) и (12).
Вертикальное положение экзоскелета неустойчиво без управления, поэтому возмущающие факторы могут обусловить отклонения от равновесия вплоть до падения экзоскелета.
Проверим работоспособность предложенного управления в задаче стабилизации вертикального положения экзоскелета. Значения для программного движения:  . Рассмотрим случай, когда в углах поворота звеньев есть отклонения около 20° от вертикального положения (рис. 4).
. Рассмотрим случай, когда в углах поворота звеньев есть отклонения около 20° от вертикального положения (рис. 4).
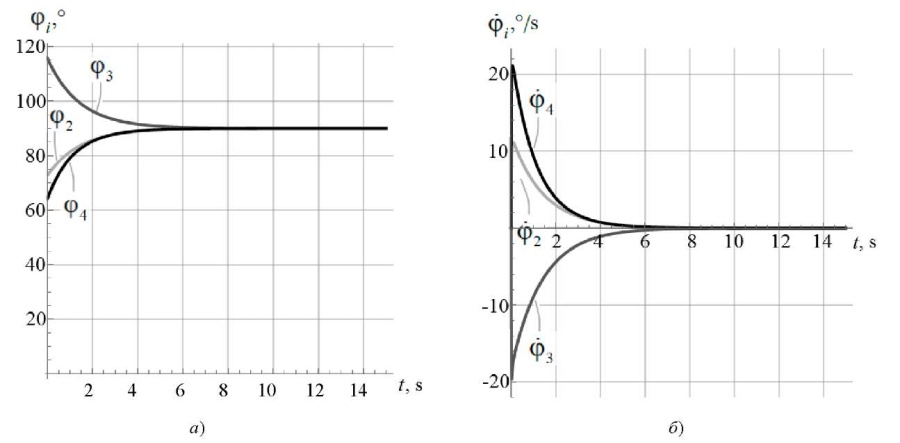
Рис. 4. Результаты моделирования стабилизации вертикального положения при начальных отклонениях от программного движения в углах поворота звеньев экзоскелета: а — углы поворота звеньев; б — угловые скорости звеньев
Из рис. 4 видно, что предложенное управление обеспечивает стабилизацию вертикального положения звеньев экзоскелета.
Для сравнения приведем результаты моделирования стабилизации вертикального положения при использовании следующих значений коэффициентов ПИД регулятора:

 (рис. 5).
(рис. 5).
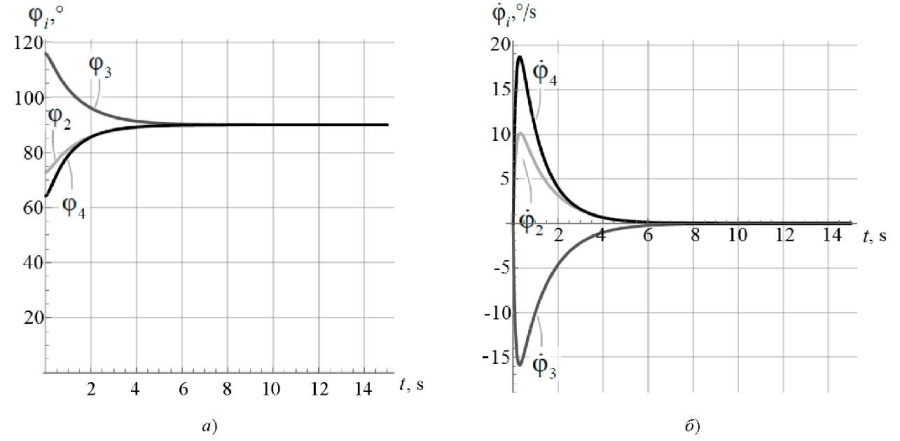
Рис. 5. Результаты моделирования стабилизации вертикального положения при начальных отклонениях от программного движения в углах поворота звеньев экзоскелета: а — углы поворота звеньев; б — угловые скорости звеньев
Из рис. 5 видно, что при использовании дифференциального звена  регулятора можно снизить выбросы в зависимостях угловых скоростей звеньев экзоскелета по сравнению со случаем
регулятора можно снизить выбросы в зависимостях угловых скоростей звеньев экзоскелета по сравнению со случаем  (рис. 4 б).
(рис. 4 б).
Итак, рассмотрена возможность управления звеньями экзоскелета нижних конечностей с использованием показаний энкодеров и блоков инерциальных датчиков (микромеханических гироскопов и акселерометров). Результаты моделирования доказывают действенность данного подхода.
Обсуждение и заключения. Предлагаемое решение задачи управления движением экзоскелета может быть использовано в медицинских приложениях, в том числе для вертикализации пациентов с нарушениями функций опорно-двигательного аппарата.
Итак, данные блоков инерциальных датчиков можно использовать в задаче оценивания состояния звеньев экзоскелета — их угловых скоростей и ускорений. При этом нет необходимости в численном дифференцировании измерительной информации энкодеров. Таким образом, в систему управления можно вводить обратную связь по угловым ускорениям, что позволяет улучшать переходные процессы при управлении движением экзоскелета.
1. Оптимизация времени вертикализации экзоскелета по критерию энергоэффективности / С. Ф. Яцун [и др.] // Вибрационные технологии, мехатроника и управляемые машины. Курск : Изд-во Юго-Зап. гос. ун-та, 2016. Ч. 2. С. 151–160.
1. Exoskeletons for Industrial Application and Their Potential Effects on Physical Work Load / M. P. De Looze, T. Bosch, F. Krause [et al.] // Ergonomics. — 2015. — Vol. 59. — P. 671–681. https://doi.org/10.1080/00140139.2015.1081988
2. Геворкян, А. А. Роботизированная механотерапия: возможность применения экзоскелета для нижних конечностей у пациентов с нарушением функции ходьбы при рассеянном склерозе / А. А. Геворкян, С. В. Котов, В. Ю. Лиждвой // Альманах клинической медицины. — 2020. — Т. 48, № 1. — С. 7–12.
3. Экзоскелет — состояние проблемы и перспективы внедрения в систему абилитации и реабилитации инвалидов (аналитический обзор) / А. А. Воробьев, О. А. Засыпкина, П. С. Кривоножкина [и др.] // Вестник Волгоградского государственного медицинского университета. — 2015. — Вып. 2 (54). — С. 9–17.
4. Трехзвенная математическая модель для задачи стабилизации вертикальной позы человека / И. В. Новожилов, А. В. Терехов, А. В. Забелин [и др.] // Математическое моделирование движений человека в норме и при некоторых видах патологии. — Москва : Изд-во механико-математического факультета МГУ. — 2005. — С. 7–20.
5. Моделирование процессов вставания экзоскелета из положения сидя / С. И. Савин, С. Ф. Яцун, А. С. Яцун, Г. Я. Пановко // Проблемы машиностроения и надежности машин. — 2016. — Т. 3. — С. 19–24.
6. Saypulaev, M. R. Development of the Lower Extremity Exoskeleton Dynamics Model Using in the Task of the Patient Verticalization / M. R. Saypulaev, Yu. Yu. Zuev, G. R. Saypulaev // Journal of Physics: Conference Series. — 2021. — Vol. 2096. — Art. 0120421. https://doi.org/10.1088/1742-6596/2096/1/012042
7. Zuev, Yu. Yu. Laws of Motion of the Lower Extremities and Structural-parametric Synthesis of Electro-Hydraulic Executive Modules of the Active Exoskeleton According to the Criterion of Energy Sufficiency / Yu. Yu. Zuev, M. R. Saypulaev, V. Doni // Journal of Physics: Conference Series. — 2021. — Vol. 2096. — Art. 012044. 10.1088/1742-6596/2096/1/012044
8. Яцун, С. Ф. Определение параметров приводов биоинженерных мехатронных модулей для экзоскелета нижних конечностей человека / С. Ф. Яцун, А. Н. Рукавицин // Известия Юго-Западного государственного университета. — 2012. — Т. 2, № 1. — С. 196–200.
9. Savin, S. I. Energy-Efficient Algorithm of Control of Exoskeleton Verticalization / S. I. Savin, A. S. Yatsun, S. F. Yatsun // Journal of Machinery Manufacture and Reliability. — 2017. — Vol. 46. — P. 512–517.
10. A Robust Adaptive-Fuzzy-Proportional-Derivative Controller for a Rehabilitation Lower Limb Exoskeleton / N. Aliman, R. Ramli, S. M. Haris [et al.] // International Journal of Engineering Science and Technology. — 2022. — Vol. 35. — Art. 101097. 10.1016/j.jestch.2022.101097
11. Adaptive Particle Swarm Optimization of PID Gain Tuning for Lower-Limb Human Exoskeleton in Virtual Environment / M. S. Amiri, R. Ramli, M. F. Ibrahim [et al.] // Mathematics. — 2020. — Vol. 8. — Art. 2040. 10.3390/math8112040
12. Development and Control of an Electro-Hydraulic Actuator System for an Exoskeleton Robot / Dongyoung Lee, Buchun Song, Sang Yong Park, Yoon Su Baek // Applied Sciences. — 2019. — Vol. 9. — Art. 4295. 10.3390/app9204295
13. Lora-Millan, J. S. An IMUs-Based Extended Kalman Filter to Estimate Gait Lower Limb Sagittal Kinematics for the Control of Wearable Robotic Devices / J. S. Lora-Millan, A. F. Hidalgo, E. Rocon // IEEE Access. — 2021. — Vol. 9. — P. 144540–144554. 10.1109/ACCESS.2021.3122160
14. Minimizing Human-Exoskeleton Interaction Force by Using Global Fast Sliding Mode Control / Duong Mien Ka, Cheng Hong, Tran Huu Toan, Jing Qiu // International Journal of Control, Automation and Systems. — 2016. — Vol. 14. — P. 1064–1073. 10.1007/s12555-014-0395-7
15. Балакришнан, А. В. Теория фильтрации Калмана / А. В. Балакришнан. — Москва : Книга по требованию. — 2021. — 164 с.
Сайпулаев Гасан Русланович, аспирант и ассистент кафедры «Робототехника, мехатроника, динамика и прочность машин»
ScopusID
111250, г. Москва, ул. Красноказарменная, 14
Сайпулаев Муса Русланович, аспирант кафедры «Робототехника, мехатроника, динамика и прочность машин»
ScopusID
111250, г. Москва, ул. Красноказарменная, 14
Меркурьев Игорь Владимирович, заведующий кафедрой «Робототехника, мехатроника, динамика и прочность машин»
ScopusID
111250, г. Москва, ул. Красноказарменная, 14
Адамов Борис Игоревич, доцент кафедры «Робототехника, мехатроника, динамика и прочность машин»
ScopusID
111250, г. Москва, ул. Красноказарменная, 14
Гарсиа Ройлан Бельо, аспирант кафедры «Робототехника, мехатроника, динамика и прочность машин»
111250, г. Москва, ул. Красноказарменная, 14
Сайпулаев Г.Р., Сайпулаев М.Р., Меркурьев И.В., Адамов Б.И., Гарсиа Р.Б. Применение блока инерциальных датчиков для оценивания положения и управления движением экзоскелета нижних конечностей. Advanced Engineering Research (Rostov-on-Don). 2022;22(3):204-213. https://doi.org/10.23947/2687-1653-2022-22-3-204-213
Saypulaev G.R., Saypulaev M.R., Merkuryev I.V., Adamov B.I., Garcia R.B. Application of an Inertial Sensor Unit for Position Estimation and Motion Control of the Lower-Extremity Powered Exoskeleton. Advanced Engineering Research (Rostov-on-Don). 2022;22(3):204-213. https://doi.org/10.23947/2687-1653-2022-22-3-204-213




ISSN 2687-1653 (онлайн)
Связаться с: Издателем / Редакцией журнала
Издатель: Донской государственный технический университет - ДГТУ, Ростов-на-Дону, Россия - https://donstu.ru/
Главный редактор: доктор технических наук, профессор, проректор Донского государственного технического университета Бескопыльный Алексей Николаевич





































