




Содержание
Перейти к:
https://doi.org/10.23947/2687-1653-2023-23-1-95-106
Перейти к:
Введение. Существенная нелинейность химических реакций кислот и оснований определяет алгоритмы управления в режиме подкисления или подщелачивания, то есть периодической дозации минимального объема кислоты или щелочи. Такое регулирование может быть малоэффективным, т. е. допускает недостаточную или избыточную концентрацию контролируемого вещества. Статья посвящена проблеме точного регулирования водородного показателя в мини-биореакторах. Предлагается использовать цифровую модель системы управления кислотностью для подбора концентраций доливаемых растворов, определения методики регулирования и повышения точности. Цель работы — обеспечение требуемой точности регулирования рН в in vitro мини-модели желудочно-кишечного тракта статического типа.
Материалы и методы. Исходная структурная схема модели включает накопители и потоки. Она представляет собой базу для основных дифференциальных уравнений, характеризующих изменение объема и кислотности. Для корректировки показаний кислотности результирующего раствора по температуре создана статическая модель, основанная на полиномиальной аппроксимации экспериментальных данных методом наименьших квадратов. В прикладном пакете Matlab Simulink исследованы структурные элементы математической модели. На реальной системе in vitro моделирования искусственного желудочно-кишечного тракта домашней птицы определены переходные характеристики для подтверждения адекватности математической модели.
Результаты исследования. В рамках данной работы авторы создали и проанализировали нелинейную математическую модель изменения pH в биореакторе с учетом внешних управляющих воздействий. Потоки раствора соляной кислоты, раствора щелочи и слива раствора из реактора представлены как элементы дифференциального уравнения, описывающего накопление жидкости в реакторе. Для повышения точности решение доработали с учетом температурной зависимости водородного показателя. Предложена математическая модель дозирования на основе регулятора с каналами щелочи и кислоты. Полученные данные позволили генерировать объединенную модель процесса регулирования pH в биореакторе. Адекватность решения подтвердили опытным путем. В виде структурных схем показаны модели: регулятора pH, регулирования объема содержимого в реакторе и химических реакций. Сравниваются переходные процессы математической модели и реальной системы управления. Установлено, что переходные характеристики математической модели и реальной системы идентичны по времени регулирования. Относительная погрешность регулирования реальной системы составила 0,35 %, а математической модели — 0,1 %, что соответствует требуемой точности регулирования ±0,1 pH. В виде графиков показано влияние исследованных потоков на реакцию нейтрализации.
Обсуждение и заключения. Предлагаемая математическая модель позволит подобрать оптимальные методы и алгоритмы регулирования кислотности, что ускорит создание регулятора нелинейного процесса регулирования водородного показателя. В будущем эти наработки можно интегрировать в комплексную цифровую модель всего искусственного желудочно-кишечного тракта домашней птицы для оптимизации алгоритмов управления (дозации, перемешивания, периодичности и т. п.), а также аппроксимации к объектам in vivo.
Донской Д.Ю., Лукьянов А.Д., Филипович В., Астен Т.Б. Математическая модель системы управления pH в in vitro модели желудочно-кишечного тракта домашней птицы. Advanced Engineering Research (Rostov-on-Don). 2023;23(1):95-106. https://doi.org/10.23947/2687-1653-2023-23-1-95-106
Donskoy D.Yu., Lukyanov A.D., Filipović V., Asten T.B. Mathematical Model of the pH Control System in an In Vitro Model of the Gastrointestinal Tract of Poultry. Advanced Engineering Research (Rostov-on-Don). 2023;23(1):95-106. https://doi.org/10.23947/2687-1653-2023-23-1-95-106
Введение. С начала 1980-х годов исследователи физиологии и функциональных особенностей внутренних органов человека пришли к пониманию, что фокус экспериментов будет смещаться от практик in vivo к in vitro [1]. Актуальность разработки систем аппаратной имитации физиологических процессов обусловлена:
К началу XXI века сформировалось научное направление по разработке методик и оборудования для моделирования и исследований in vitro [1].
В настоящее время известны статические и динамические in vitro модели желудочно-кишечного тракта (ЖКТ). В первом случае речь идет о моделировании процессов пищеварения при использовании жидких питательных сред [2]. Динамические модели, в отличие от статических, позволяют моделировать перистальтические движения в ЖКТ и используются при работе с пищевыми матрицами в виде суспензий, включающих твердые частицы и волокна.
Цель данной работы — обеспечение требуемой точности регулирования pH в in vitro мини-модели ЖКТ статического типа.
Для достижения цели решаются следующие задачи:
Материалы и методы. С точки зрения моделируемого объема модели ЖКТ подразделяются на микро- (до 50 мл), мини- (от 50 до 400 мл) и макросистемы (свыше 400 мл) [3]. Отдельно следует упомянуть микрофлюидные системы [4], но они выходят за рамки данной работы.
Патентный анализ позволяет назвать первое зарегистрированное изобретение в данной сфере — «In vitro модель in vivo пищеварительного тракта»1. Эта динамическая система предшествовала появлению систем типа TIM2 [5]. Идея развивалась в моделях DGM [6], TIM2 [5], HGS [7] и др. Статические модели (DIDGI [8], SIMGI [9], SHIME [10], ARCOL [11] и др.) ушли от сложного моделирования перистальтики и сфокусировались на более точном моделировании собственно процессов пищеварения. Первая причина — техническая сложность и дороговизна реализации систем с динамическим сжатием содержимого. Вторая — развитие методов математического моделирования и микроконтроллерных систем управления, позволивших мониторить среду в пробирке (реакторе) с высокой точностью и стабильностью [4].
В данной работе рассматривается решение частной задачи математического моделирования процесса регулирования pH для in vitro мини-модели желудочно-кишечного тракта (ЖКТ) статического типа [12]. Точность управления кислотностью химуса определяется жесткими требованиями к условиям экспериментов in vitro. Точность автоматического регулирования pH в биореакторе не может быть ниже ±0,1 единицы2. Это принципиально для правдоподобия условий процессов пищеварения и соблюдения требований к повторяемости результатов опытов. При этом pH может быть от слабощелочной (7,9 pH, ротовая полость) до сильно кислотной (1,3 pH, желудок).
Для моделирования реакции нейтрализации воспользуемся методом накопителей и потоков [13]. Его база — это законы сохранения (накопители), а также математическое описание закономерностей, изменяющих количество накапливаемого признака (потоки). Структурная схема данной модели с двумя накопителями представлена на рис. 1.

Рис. 1. Структурная схема модели с двумя накопителями
Реактор как физический объект накапливает некоторое количество:
В этой емкости идет контролируемый процесс пищеварения с изменением pH и объема жидкости.
На первый накопитель действуют три потока:
На второй накопитель также влияют три потока:
Последний поток представляет собой возмущающее воздействие и не исследуется в данной работе.
Результаты исследования. Рассмотрим математическую реализацию модели для описания физикохимических процессов.
Объем жидкости в реакторе:
V = S * h. (1)
Изменение объема жидкости в реакторе:
dV = S * dh. (2)
Для удобства назовем:
Таким образом, дифференциальное уравнение, описывающее накопление жидкости в реакторе:
 (3)
(3)
Для определения динамики изменения концентрации раствора в реакторе необходимо найти дифференциал количества вещества:
v = V * C, (4)
где V — это объем вещества, л; C — молярная концентрация, моль/л.
Из (4) и (1) получаем:
 (5)
(5)
На изменение концентрации раствора влияют потоки щелочи и кислоты с определенной концентрацией. Значит:
 (6)
(6)
Из (6) выведем изменение концентрации и упростим выражение:
 (7)
(7)
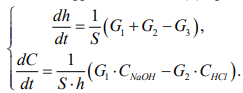
Представим систему дифференциальных уравнений, описывающих динамику изменения объема и концентрации раствора в биореакторе:
 (8)
(8)
Зная основы химии и принимая во внимание (8), можно определить концентрацию катионов H ([H+]). Концентрации ионов водорода ([H+]) и гидроксид-ионов ([OH−]) в дистиллированной воде при 25 °C равны и составляют по 10−7 моль/л. Это следует из определения ионного произведения воды [11]:
 (9)
(9)
Также стоит учитывать, что:
 (10)
(10)
Теперь найдем [H+] (обозначим, как CH) через квадратный корень из предыдущих выражений с учетом концентрации раствора по уравнению (4) [14]:
 (11)
(11)
Здесь ионы i = 4.
Для создания системы регулирования с обратной связью по кислотности в виде водородного показателя (pH) используем отрицательный десятичный логарифм из концентрации, рассчитанной по уравнениям (7), и получим кислотность раствора при нормальных условиях, то есть при 25 °C.
Однако содержимое биореактора не всегда находится в нормальных условиях. Например, для создания искусственной среды, свойственной in vivo среде желудочно-кишечного тракта домашней птицы, в реакторе поддерживается температура 42 °C. Поэтому на высокоточных измерителях pH получили матрицу изменения pH буферных растворов в зависимости от температуры. Показания фиксировали по измерительной системе с термокомпенсацией для применяемого электрода [13]. С этой целью использовали данные эксперимента и сведения из открытых источников3.
В итоге построили статическую модель. Ее получили полиномиальной аппроксимацией методом наименьших квадратов. Зависимость pH от температуры визуализирована на рис. 2 [14–16].
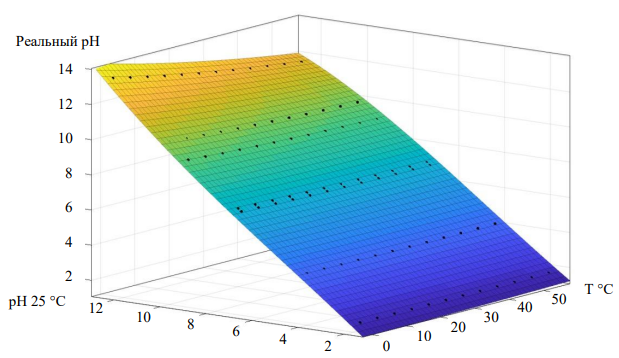
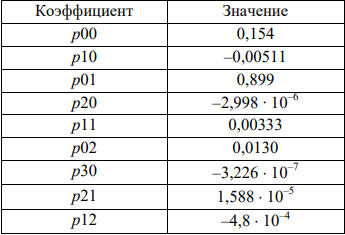
Рис. 2. Поверхность, описывающая зависимость pH от температуры (12)
 (12)
(12)
Коэффициенты уравнения представлены в таблице 1.
Таблица 1
Коэффициенты уравнения (11)
Для определения переходных процессов в системе построим математическую модель в прикладном пакете Matlab Simulink (рис. 3):
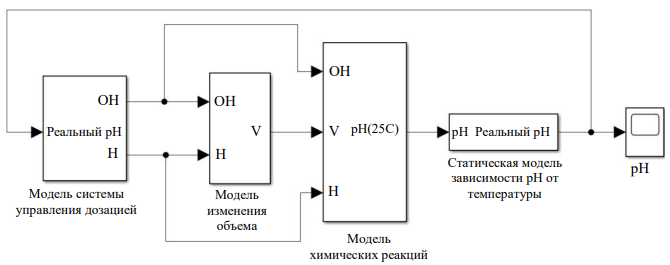
Рис. 3. Общая структура математической модели в Matlab Simulink
Рассмотрим созданную систему по блокам. Первый — блок двухканального регулятора по кислотности с обратной связью. В цепь обратной связи введены шумы для моделирования случайных событий реальной системы измерения кислотности и погрешности измерительных приборов.
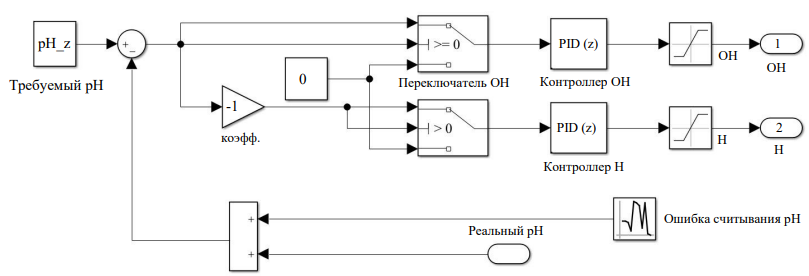
Рис. 4. Структура регулятора pH, блок «Модель системы управления дозацией»
Второй блок — это система контроля объема раствора в реакторе. Функция Volume change model моделирует включение откачивания. Так обеспечивается постепенный сброс раствора до необходимого объема при его приближении к максимуму.
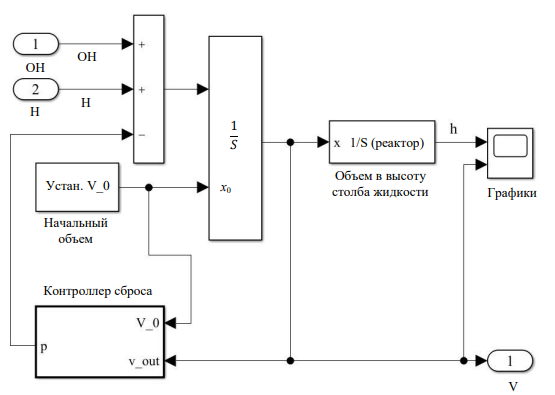
Рис. 5. Структура модели регулирования объема содержимого в реакторе, блок «Модель изменения объема»
Третий блок — основной. Он реализует расчет химической реакции кислоты и щелочи при добавлении в реактор и вычисление pH конечного раствора при нормальных условиях. Функция Neutralization определяет концентрацию ионов водорода в растворе [12]. Блок Concentration in pH преобразует концентрацию в водородный показатель pH.
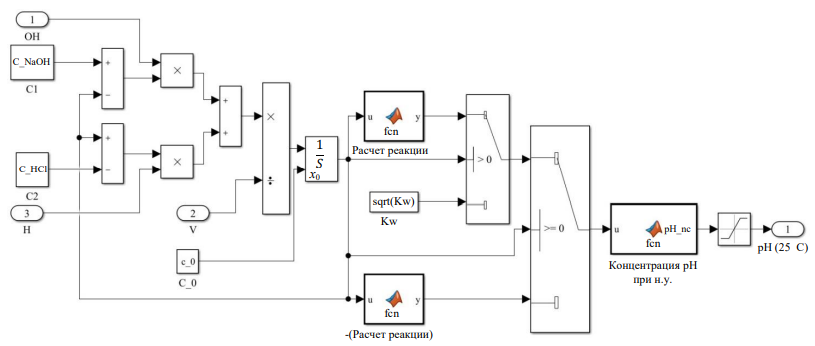
Рис. 6. Структура модели, описывающей химические реакции, блок «Модель химических реакций»
Функция статистической модели в четвертом блоке (Temperature correction) позволяет учесть температурные изменения раствора.
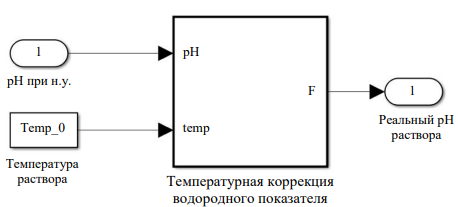
Рис. 7. Структура модели, описывающей изменение кислотности от температуры, блок «Статическая модель зависимости pH от температуры»
Для определения адекватности переходных характеристик результирующей математической модели проводились эксперименты на имитационной модели. Реальная модель представлена системой автоматизированного управления искусственным ЖКТ домашней птицы с одним блоком управления и биореактором. Оборудование представлено на рис. 8.
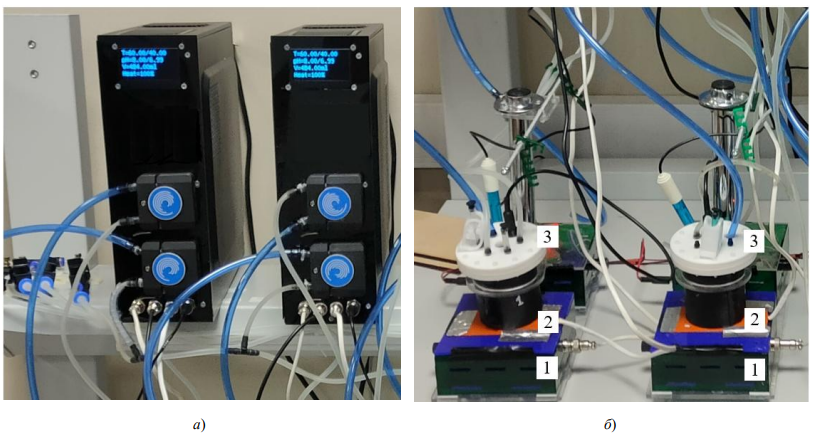
Рис. 8. Оборудование для проведения исследований: а — система управления параметрами среды в биореакторе; б — элементы биореактора. 1 — управляемые перемешивающие устройства; 2 — нагреватели; 3 — порты для датчиков и системы дозации жидкостей
Опишем методику проведения эксперимента. В математической модели учитываются характеристики реальной системы:
Математическая модель представляет собой идеальную систему: смешивание растворов в реакторе происходит мгновенно и равномерно. В реальных условиях это невозможно, поэтому для равномерного растворения добавленной кислоты или щелочи необходимо принудительное перемешивание. В имитационной модели данная проблема решается магнитной мешалкой с управлением SCADA4.
К сожалению, такой тип перемешивающего устройства наводит на pH-электрод электромагнитные помехи. Для исключения помех устройство перемешивания кратковременно отключалось. Дискретность измерений и работы регулятора составила 20 секунд, что обусловлено экспериментально установленным временем нормализации показаний pH электрода в реакторе (по документации электрода возможна дискретизация до 1– 2 минут) 5 6. В целях обеспечения безопасности регулятор реальной системы ограничен в максимальном объеме дозируемой кислоты или щелочи, что учитывалось в модели.
На рис. 9 сравниваются переходный процесс математической модели и реальной системы управления. PHэлектрод — это чувствительный элемент, на который воздействуют внешние электромагнитные помехи.
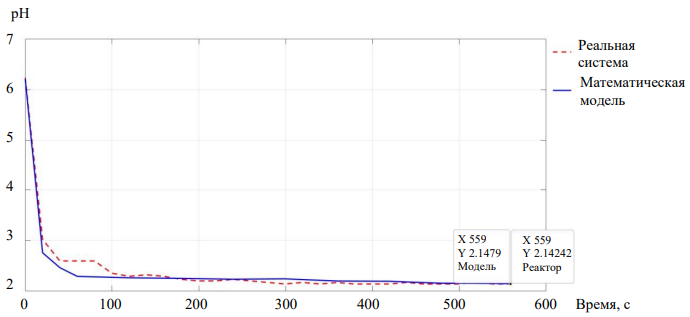
Рис. 9. Переходные характеристики математической модели и реальной системы при регулировании от 6,2 до 2,15 pH
Один из экспериментов проводился при заданной кислотности раствора 2,15±0,05 pH. Кислотность исходного раствора — 6,2 pH. Температура раствора в реакторе — 22,25 °C. Для изменения кислотности использовались растворы 0,1 моль/литр NaOH и 0,1 моль/литр HCl. Алгоритм дозации заключался в дискретном пропорциональном регулировании.
На рис. 10 представлены интегралы по потокам из дифференциального уравнения (7).
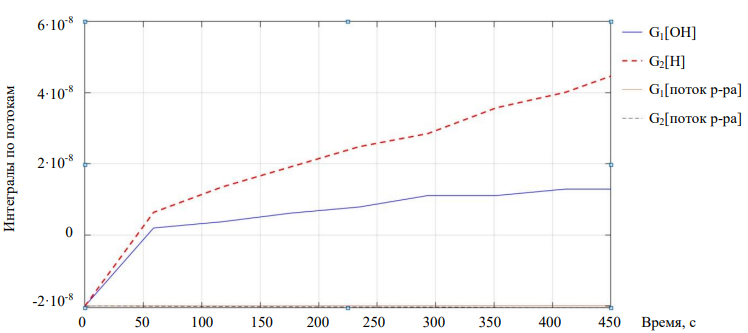
Рис. 10. Влияние каждого потока на реакцию нейтрализации в ходе экспериментов
Обсуждение и заключения. Анализ результатов моделирования показал, что потоки с концентрацией раствора в реакторе не вносят весомого вклада в регулирование всей системы, поэтому ими можно пренебречь. Тогда система дифференциальных уравнений цифровой модели (8) приобретет следующий вид:
 (13)
(13)
По результатам экспериментов с учетом концентрации раствора в реакторе относительная погрешность установившейся кислотности раствора для математической модели составила 0,1 %, а для реальной системы с тем же алгоритмом — 0,35 %.
Итак, в математической модели учтем погрешность показаний электрода и пренебрежем перемешиванием растворов. Абсолютная погрешность результатов регулирования находится в допустимых пределах и не превышает ±0,1 pH от заданной величины. Это означает, что разработанная математическая модель адекватно описывает кривую реакции нейтрализации и в будущем позволит подобрать оптимальные алгоритмы регулирования, что было бы трудоемким процессом в реальной системе.
Разработанная модель решает поставленную задачу. Она представляет собой математический инструмент для создания методик и алгоритмов регулирования pH с учетом температуры содержимого мини-реактора, начальной концентрации основного раствора и концентраций доливаемых растворов. Такой подход позволяет совершенствовать существующие алгоритмы управления.
1. Minekus M., Havenaar R. In vitro model of an in vivo digestive tract : патент US005525305A США : B01F31/55 ; заявл. 01.11.94 ; опубл. 11.06.96.
2. Чикиндас М. Л. Ветеринарные пробиотические препараты направленного модулирования здоровья животных // Mega grants : [сайт]. URL https://p220.ru/labs/lab_rus_74331/ (дата обращения 28.02.2023).
3. Automatic Temperature Compensation in pH Measurement / Horiba // horiba.com : [сайт]. URL: https://www.horiba.com/esp/waterquality/support/technical-tips/bench-meters/automatic-temperature-compensation-in-phmeasurement/?utm_source=uhw&utm_medium=301&utm_campaign=uhw-redirect (дата обращения: 25.12.2022).
4. От англ. Supervisory Control And Data Acquisition — диспетчерское управление и сбор данных. Программный пакет для создания или поддержки работы систем сбора, обработки, отображения и хранения информации об объекте мониторинга или управления.
5. Ph-4502c pH meter calibration notes / tlfong01,blog // tlfong01,blog. My electronics diy projects : [сайт]. URL: https://tlfong01.blog/2019/04/26/ph-4502c-ph-meter-calibration-notes/ (дата обращения: 30.11.2022).
6. EZO™ pH Circuit Datasheet / Atlas Scientific LLC // files.atlas-scientific.com : [сайт]. URL: https://files.atlasscientific.com/pH_EZO_Datasheet.pdf (дата обращения: 30.11.2022).
1. Verhoeckx K., Cotter P., Lopez-Exposito I., et al. (eds.) The Impact of Food Bioactives on Health. In Vitro and Ex Vivo Models. Cham, Heidelberg, New York, Dordrecht, London: Springer Open; 2015. 342 p. URL: https://www.ncbi.nlm.nih.gov/books/NBK500148/ (дата обращения: 28.09.2022).
2. Alegría A., Garcia-Llatas G., Cilla A. Static Digestion Models: General Introduction. In book: The Impact of Food Bioactives on Health. In Vitro and Ex Vivo Models. Cham, Heidelberg, New York, Dordrecht, London: Springer Open; 2015. P. 3–12. URL: https://link.springer.com/chapter/10.1007/978-3-319-16104-4_1 (дата обращения: 28.09.2022).
3. Dupont D., Alric M., Blanquet-Diot S., et al. Can Dynamic In Vitro Digestion Systems Mimic the Physiological Reality? Critical Reviews in Food Science and Nutrition. 2019;59:1546–1562. URL: https://doi.org/10.1080/10408398.2017.1421900
4. Steinway S.N., Saleh J., Bon-Kyoung Koo, et al. Human Microphysiological Models of Intestinal Tissue and Gut Microbiome. Frontiers in Bioengineering and Biotechnology. 2020;8:725. URL: https://www.frontiersin.org/articles/10.3389/fbioe.2020.00725 (дата обращения: 28.09.2022).
5. Venema K. The TNO In Vitro Model of the Colon (TIM-2). In book: The Impact of Food Bioactives on Health. In Vitro and Ex Vivo Models. Cham, Heidelberg, New York, Dordrecht, London: Springer Open; 2015. P. 293–304. URL: https://link.springer.com/chapter/10.1007/978-3-319-16104-4_26 (дата обращения: 28.09.2022).
6. Mandalari G., Chessa S., Bisignano C., et al. The Effect of Sundried Raisins (Vitis vinifera L.) on the In Vitro Composition of the Gut Microbiota. Food & Function. 2016;7:4048–4060. URL: http://dx.doi.org/10.1039/C6FO01137C (дата обращения: 28.09.2022).
7. Ferrua M., Singh R. Human Gastric Simulator (Riddet Model). In book: The Impact of Food Bioactives on Health. Cham, Heidelberg, New York, Dordrecht, London: Springer Open; 2015. P. 61–71. https://doi.org/10.1007/978-3-319-16104-4_7
8. Ménard O., Picque D., Dupont D. The DIDGI®system. In book: The Impact of Food Bioactives on Health. In Vitro and Ex Vivo Models. Cham, Heidelberg, New York, Dordrecht, London: Springer Open; 2015. P. 73–81. http://dx.doi.org/10.1007/978-3-319-16104-4_8
9. Barroso E., Cueva C., Peláez C., et al. The Computer-Controlled Multicompartmental Dynamic Model of the Gastrointestinal System SIMGI. In book: The Impact of Food Bioactives on Health. In Vitro and Ex Vivo Models. Cham, Heidelberg, New York, Dordrecht, London: Springer Open; 2015. P. 319–327. http://dx.doi.org/10.1007/978-3-319-16104-4_28
10. Van de Wiele T., Van den Abbeele P., Ossieur W., et al. The Simulator of the Human Intestinal Microbial Ecosystem (SHIME®). In book: The Impact of Food Bioactives on Health. In Vitro and Ex Vivo Models. Cham, Heidelberg, New York, Dordrecht, London: Springer Open; 2015. P. 305–317. https://doi.org/10.1007/978-3-319-16104-4_27
11. González C, González D, Zúñiga RN, et al. Simulation of Human Small Intestinal Digestion of Starch Using an In Vitro System Based on a Dialysis Membrane Process. Foods. 2020;9(7):913. https://doi.org/10.3390/foods9070913
12. Donskoy D., Katin O., Alekseenko L. Development and Implementation of the GIT-Modelling Bioreactor System: The Way to Reducing a Carbon Footprint. E3S Web of Conferences. 2021;279:01030. https://doi.org/10.1051/e3sconf/202127901030
13. Asuero A.G., Michałowski T. Comprehensive Formulation of Titration Curves for Complex AcidBase Systems and Its Analytical Implications. Critical Reviews in Analytical Chemistry. 2011;41:151–187. http://dx.doi.org/10.1080/10408347.2011.559440
14. Garcia C., Juliani R. Modelling and Simulation of pH Neutralization Plant Including the Process Instrumentation. In book: Michalowski T (ed.). Applications of MATLAB in Science and Engineering. 2011. P. 485–510. http://dx.doi.org/10.5772/1534
15. Egger L., Ménard O., Abbühl L., et al. Higher Microbial Diversity in Raw than in Pasteurized Milk Raclette-Type Cheese Enhances Peptide and Metabolite Diversity after In Vitro Digestion. Food Chemistry. 2021;340:128154. https://doi.org/10.1016/j.foodchem.2020.128154
16. Chistyakov V.A., Lukyanov A.D., Donskoy D.Yu., et al. Modeling and Analysis of Energy Efficiency of Methods for Maintaining Temperature Conditions in Microbioreactors. IOP Conference Series: Materials Science and Engineering. 2020;900:012015. http://dx.doi.org/10.1088/1757-899X/900/1/012015
Донской Данила Юрьевич, ассистент кафедры «Автоматизация производственных процессов»
344003, г. Ростов-на-Дону, пл. Гагарина, 1
Лукьянов Александр Дмитриевич, заведующий кафедрой «Автоматизация производственных процессов», кандидат технических наук, доцент
344003, г. Ростов-на-Дону, пл. Гагарина, 1
Владимир Филипович, доктор кафедры «Химическая инженерия»
21000, г. Нови-Сад, бул. Цара Лазара, 1
Астен Тамара Борисовна, профессор кафедры «Мировые языки и культуры», доктор филологических наук
344003, г. Ростов-на-Дону, пл. Гагарина, 1
Донской Д.Ю., Лукьянов А.Д., Филипович В., Астен Т.Б. Математическая модель системы управления pH в in vitro модели желудочно-кишечного тракта домашней птицы. Advanced Engineering Research (Rostov-on-Don). 2023;23(1):95-106. https://doi.org/10.23947/2687-1653-2023-23-1-95-106
Donskoy D.Yu., Lukyanov A.D., Filipović V., Asten T.B. Mathematical Model of the pH Control System in an In Vitro Model of the Gastrointestinal Tract of Poultry. Advanced Engineering Research (Rostov-on-Don). 2023;23(1):95-106. https://doi.org/10.23947/2687-1653-2023-23-1-95-106




ISSN 2687-1653 (онлайн)
Связаться с: Издателем / Редакцией журнала
Издатель: Донской государственный технический университет - ДГТУ, Ростов-на-Дону, Россия - https://donstu.ru/
Главный редактор: доктор технических наук, профессор, проректор Донского государственного технического университета Бескопыльный Алексей Николаевич





































