




Содержание
Перейти к:
https://doi.org/10.23947/2687-1653-2025-25-2-142-151
EDN: LDXARH
Перейти к:
Введение. Управление подводными робототехническими комплексами (ПРТК) осложняется такими факторами, как инерционность, стохастические возмущения и недостаток навигационной инфраструктуры. Существующие подходы к моделированию и прогнозированию поведения ПРТК известны слабой или отсутствующей интеграцией данных с реальных сенсоров в режиме реального времени. Устранив указанный пробел в комплексных решениях, можно объединить физические модели, цифровые двойники и визуализацию. Перспективный инструмент для преодоления названных выше ограничений — цифровой двойник (англ. digital twin, DT), обеспечивающий точную цифровую репрезентацию объекта через интеграцию данных от физических сенсоров и математических моделей. Цель представленного исследования — разработка метода прогнозирования динамики ПРТК с использованием цифрового двойника для повышения эффективности автономного управления.
Материалы и методы. Основа исследования — разработка математической модели движения подводного робототехнического комплекса. Она включает дифференциальную кинематику, моделирование сопротивления среды и динамики поворота. Для сбора и обработки данных использовались сенсоры: инкрементальные энкодеры, трехосевой акселерометр и гироскоп. Для управления движением по каждой оси задействовали пропорционально-интегрально дифференцирующий (ПИД) регулятор. Для визуализации и проверки модели применялась игровая среда «Юнити» (Unity). В ней создали модуль цифрового двойника с возможностью отображения состояния системы в реальном времени. В качестве программного обеспечения использовалась платформа «Ардуино Ай-ди-и» (Arduino IDE) для низкоуровневого программирования, а также «Матлаб» (Matlab) и «Питон» (Python) для анализа данных и построения графиков.
Результаты исследования. Для верификации модели проводились эксперименты на физическом макете. Их сопоставили с симуляцией поведения объекта в виртуальной среде. Представлены графики расхождений между физическими и симулированными траекториями. Рассчитаны статистические метрики, характеризующие точность цифрового двойника. Максимальное отклонение по координатам не превышает 5,3 мм, среднее угловое отклонение составило 3,5°. Это подтверждает достоверность и практическую применимость предложенной модели при автономном управлении робототехническим комплексом. Установлено также, что средняя ошибка по X — 3,11 мм, по Y — 2,92 мм. Средняя ошибка угла Z — 1,8°. Время реакции — менее 10 мс. Устойчивость цифрового двойника к незначительным флуктуациям в данных обеспечивается благодаря сглаживанию входных данных, стабильностью системного регулятора и адаптации модели к калибровочным значениям на старте каждого цикла.
Обсуждение и заключение. Цифровые двойники подходят для прогностического управления и наблюдения за объектом в условиях неопределенности. Предложенный подход целесообразно масштабировать для различных типов робототехнических систем, функционирующих в агрессивных и слабо предсказуемых средах. Дальнейшие исследования в этом направлении могут быть связаны с внедрением адаптивных и нейросетевых методов управления.
Гладышев М.Д., Рыбаков А.В. Интеграция сенсорных данных и математическое моделирование поведения подводного робота с использованием цифрового двойника. Advanced Engineering Research (Rostov-on-Don). 2025;25(2):142-151. https://doi.org/10.23947/2687-1653-2025-25-2-142-151. EDN: LDXARH
Gladyshev M.D., Rybakov A.V. Integration of Sensor Data and Mathematical Modeling of Underwater Robot Behavior Using a Digital Twin. Advanced Engineering Research (Rostov-on-Don). 2025;25(2):142-151. https://doi.org/10.23947/2687-1653-2025-25-2-142-151. EDN: LDXARH
Введение. В последние годы растет интерес к технологии цифровых двойников (digital twin — DT). Это виртуальные модели, тесно связанные с физическими объектами и предназначенные для отображения, анализа и прогнозирования их поведения в реальном времени [1]. DT широко применяются для решения прикладных задач в промышленности, энергетике и транспорте, особенно если необходимы контроль и управление объектами в условиях высокой неопределенности [2]. При распространении автономных робототехнических систем цифровой двойник становится важным инструментом, обеспечивающим надежное и устойчивое управление. Он позволяет формировать предсказательную модель поведения объекта, учитывающую как внутренние параметры, так и внешние воздействия [3].
Особый интерес представляет применение DT в управлении подводными робототехническими комплексами (ПРТК), где условия эксплуатации значительно осложнены слабой видимостью, отсутствием точной навигации, задержками связи, высокой инерционностью, шумами в сенсорных данных. Все это снижает эффективность традиционных замкнутых систем управления [4]. В открытом доступе есть публикации о цифровых двойниках, однако тема все еще недостаточно разработана с точки зрения использования DT в подводных системах. Имеющиеся исследования, как правило, либо не охватывают задачи предиктивного управления, либо не учитывают специфику подводной среды и типичные ошибки сенсоров [5]. Для многих работ характерны существенные пробелы, связанные с отсутствием интегрированных решений по построению цифровых двойников подводных робототехнических комплексов, ориентированных на устойчивое предсказательное управление и оценку состояния в условиях шумных и неполных данных.
Требуется устойчивая оценка текущего состояния подводного робототехнического комплекса (ПРТК), и ее может обеспечить интеграция сенсорных данных — акселерометрии, гироскопии, энкодерных измерений и других источников. Однако из-за нестабильности и шумов, типичных для инерциальных сенсоров, необходимо реализовать алгоритмы фильтрации, коррекции и калибровки данных на разных этапах работы [5].
Отметим также, что в литературе, посвященной цифровому моделированию и управлению робототехническими системами, авторы часто делают акцент на статических моделях или на ограниченных сценариях управления (например, на навигации или стабилизации положения). В то же время недостаточно проработан комплексный подход к прогнозированию именно динамического поведения ПРТК с применением цифровых двойников в реальном времени.
В связи с вышесказанным, цель настоящего исследования — разработка и применение метода прогнозирования динамического поведения ПРТК с использованием цифрового двойника для повышения эффективности управления автономной системой при выполнении подводных инженерных работ.
Материалы и методы. Для достижения цели исследования реализована комплексная модель, включающая физико-математическое описание движения, сенсорную архитектуру и визуализацию.
Научные изыскания позволили решить следующие задачи:
В рамках представленной работы:
Движение ПРТК описывается на основе дифференциальной кинематики и уравнений, учитывающих сопротивление воды, инерционные характеристики системы и управляющие воздействия. В основе модели — система уравнений движения второго порядка, модифицированная с учетом гидродинамического сопротивления и корректирующих коэффициентов, полученных экспериментально. Приняты допущения о жесткости корпуса, незначительном дрейфе и квазистационарном движении.
Вектор состояния системы включает координаты: x, y, z, и курсовой угол θ, а также линейные и угловые скорости. Используемые во введении формулы описывают кинематические соотношения, обратную связь, модель сопротивлений и управляющие сигналы. Для управления по продольной, поперечной и вертикальной осям используются ПИД-регуляторы с параметрами, эмпирически подобранными по результатам отклика системы.
Для сбора данных в режиме реального времени использовали модульную сенсорную систему. Ее элементы:
Сенсорные данные предварительно фильтровали, калибровали (нормировка относительно нулевого положения) и интегрировали в модель цифрового двойника.
Ключевой этап в построении цифрового двойника — математическое моделирование движения подводного робототехнического комплекса. Оно позволяет прогнозировать поведение объекта в различных средах [6]. В рамках данного исследования рассматривается подвижный ПРТК с жесткой физической структурой, перемещающийся в плоской (2D) или пространственной (3D) системе координат в зависимости от сценария задачи [7]. Для управления движением используется независимый привод каждого из траков, что позволяет реализовать дифференциальное маневрирование [8].
Для моделирования положения и ориентации ПРТК на плоскости используется кинематическая модель дифференциального робота, основанная на положении центра масс (или центра геометрии) робота [9]. Пусть x и y — координаты центра масс в глобальной системе координат, θ — ориентационный угол робота (угол между продольной осью и осью OX в глобальной системе).
 (1)
(1)
 (2)
(2)
 (3)
(3)
где v — линейная скорость центра масс (определяется по показаниям энкодеров); w — угловая скорость (получается с гироскопа или рассчитывается по разнице скоростей гусениц).
Линейная и угловая скорости связаны с индивидуальными скоростями правой vR и левой vL гусениц:
 (4)
(4)
 (5)
(5)
где L — база робота (расстояние между гусеницами).
На поведение робота существенно влияет подводная среда: сопротивление воды, подъемная сила, вязкие силы, силы трения. Эти воздействия учтены в виде обобщенного возмущения Fd(t) [10]. Система дифференциальных уравнений приобретает вид:
 (6)
(6)
где M — масса робота;  — радиус-вектор положения; Fu(t) — управляющее воздействие от системы приводов (определяется ПИД-регулятором или иным алгоритмом); Fd(t) — возмущения среды (определяются экспериментально или задаются эмпирически).
— радиус-вектор положения; Fu(t) — управляющее воздействие от системы приводов (определяется ПИД-регулятором или иным алгоритмом); Fd(t) — возмущения среды (определяются экспериментально или задаются эмпирически).
В рамках макета и цифровой модели сопротивление среды можно учесть в виде затухающего члена:
 (7)
(7)
где ku — коэффициент вязкого сопротивления среды (настраиваемый параметр цифрового двойника).
Физический макет оснащен энкодерами, поэтому положения и ориентация ПРТК в пространстве рассчитываются через численную интеграцию скоростей, полученных с левого и правого трака:
 (8)
(8)
 (9)
(9)
где ΔsL, ΔsR — приращения расстояния по показаниям энкодеров; Δs — приращение центра масс; Δθ — изменение ориентации.
Используем текущую ориентацию Δθ, чтобы выразить новое положение в глобальной системе координат:
 (10)
(10)
 (11)
(11)
Математическое моделирование — фундаментальная часть разработки цифрового двойника подводного комплекса [11]. Целью моделирования является формализация процессов движения [12], управления и реакции на внешние воздействия с возможностью дальнейшего анализа устойчивости и точности исполнения управляющих воздействий [13].
Подводный робот рассматривается как система с несколькими входами и выходами, находящаяся в среде с высоким уровнем инерционности, запаздывания и стохастических возмущений [14]. Управляющие воздействия реализуются через модули тяги, а перемещения отслеживаются с помощью энкодеров и инерциальных измерительных модулей [15]. Модель можно описать как систему уравнений второго порядка с обратной связью по положению и скорости:
 (12)
(12)
где M — матрица масс (включает инерционные характеристики); D — матрица демпфирования (учет вязкого сопротивления воды); K — матрица жесткости (включает упругие силы в случае механических ограничений); x(t) — вектор положения и ориентации в 3D-пространстве; u(t) — управляющее воздействие (сигналы на моторы); B — матрица распределения управления.
Для вращательного движения используется модель Эйлера:
 (13)
(13)
где J — тензор инерции робота, ω(t) — угловая скорость (с гироскопа), τ(t) — управляющий момент.
При реализации поворота на месте, как правило, используются траки с разным направлением вращения. Разность скоростей на правом и левом траке задает момент:
 (14)
(14)
Для задания угла поворота используется выражение:
 (15)
(15)
Система управления реализуется в виде ПИД-регуляторов по каждой оси (X, Y, Z):
 (16)
(16)
где e(t) = xreF(t) − x(t) — ошибка между целевым и текущим положением. Коэффициенты Kp, Ki, KD настраиваются по критерию оптимальности.
Таблица 1
Коэффициенты регуляторов для стабилизации положения
|
Ось |
Kp |
Ki |
Kd |
|
X |
1,2 |
0,05 |
0,6 |
|
Y |
1,0 |
0,04 |
0,5 |
|
Z |
2,0 |
0,1 |
0,9 |
Физическую модель робота реализовали на базе Arduino Mega 2560 Pro. Микроконтроллер — ATMega 2560-16AU, 16 МГц, 256 КБ FLash, с 54 цифровыми вводами/выводами (I/O), 16 аналоговыми входами, USB-UART интерфейсом CH340G. Комплекс подключен к сенсорам и системе управления приводами. Данные собирали и передавали в цифровую среду через последовательный порт (Serial), в формате объединенных строк с временной меткой.
Виртуальная реализация цифрового двойника создана в Unity. C#-скрипты использовались для интерпретации данных, отображения перемещений, поворотов и поведения объекта в трехмерной среде. Визуализируются оси, контуры, значения координат и траектории. Применена модель полупрозрачного робота, не взаимодействующего с другими объектами, что позволяет сконцентрироваться на сравнении движений.
На стороне Unity были реализованы обработчик данных и система фильтрации. Для расчета углов и координат применили интеграцию с коррекцией по сенсорным данным. Отдельные блоки реализовали в виде скриптов с возможностью масштабирования проекта. Для статистической оценки точности использовали стандартные метрики: среднеквадратичное отклонение, максимальное отклонение, средняя ошибка по координатам и углам.
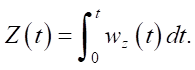
Результаты исследования. Для верификации модели в цифровой среде симулировались движения под действием последовательных управляющих воздействий. Затем сопоставили траектории прямолинейного и полукругового движения (рис. 1 и 3). Показания цифрового робота сравнивались с идеальной траекторией. Среднеквадратичный анализ показал расхождение при движении по прямой (рис. 2) и по полукругу (рис. 4).
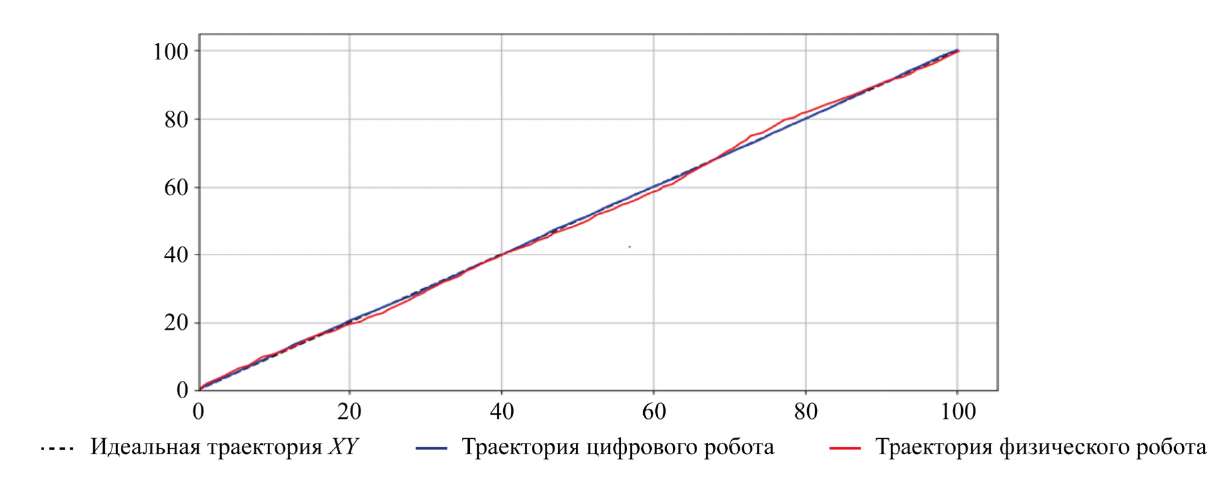
Рис. 1. Траектории движения по прямой
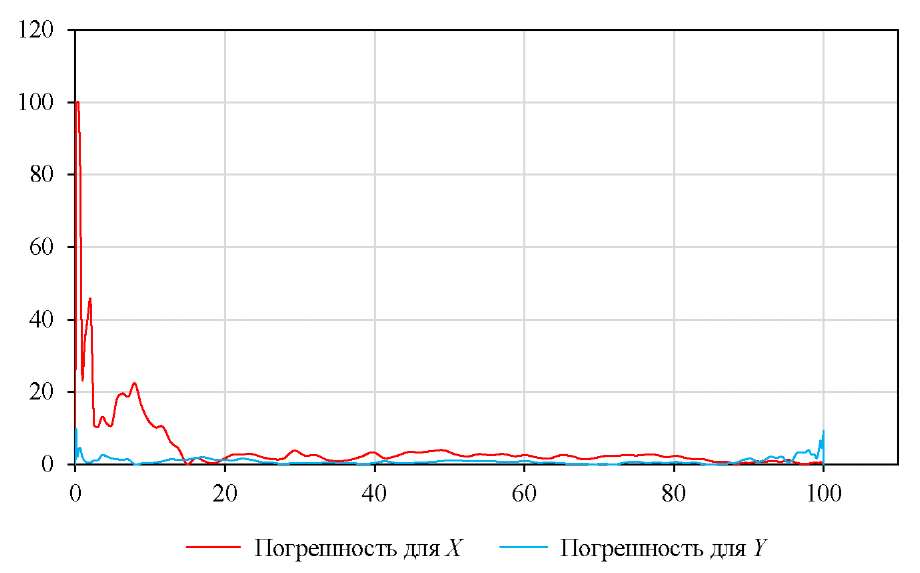
Рис. 2. Погрешность (%) при замере на прямой
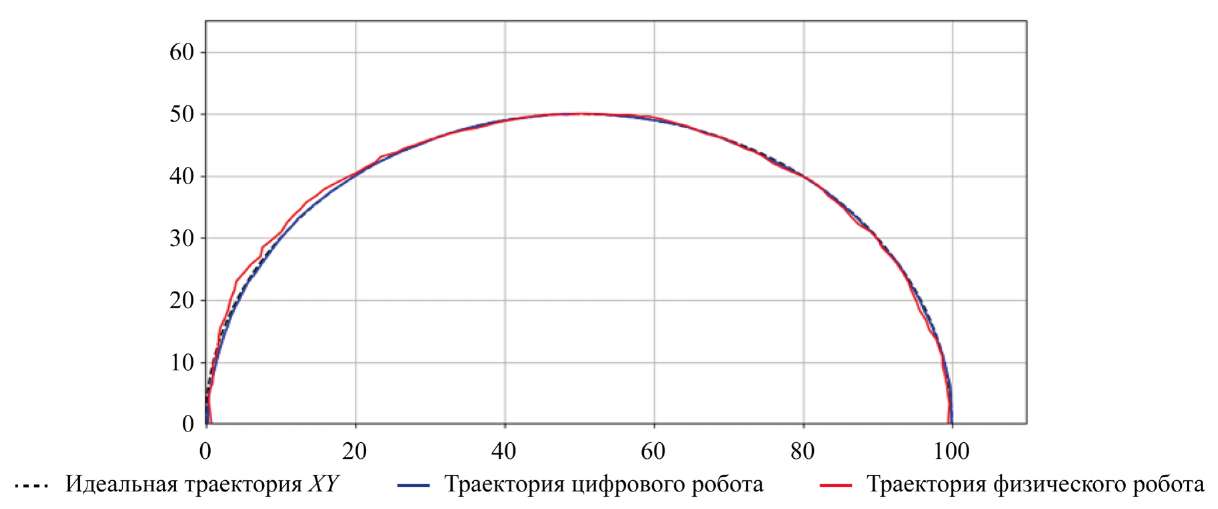
Рис. 3. Траектории движения по полукругу
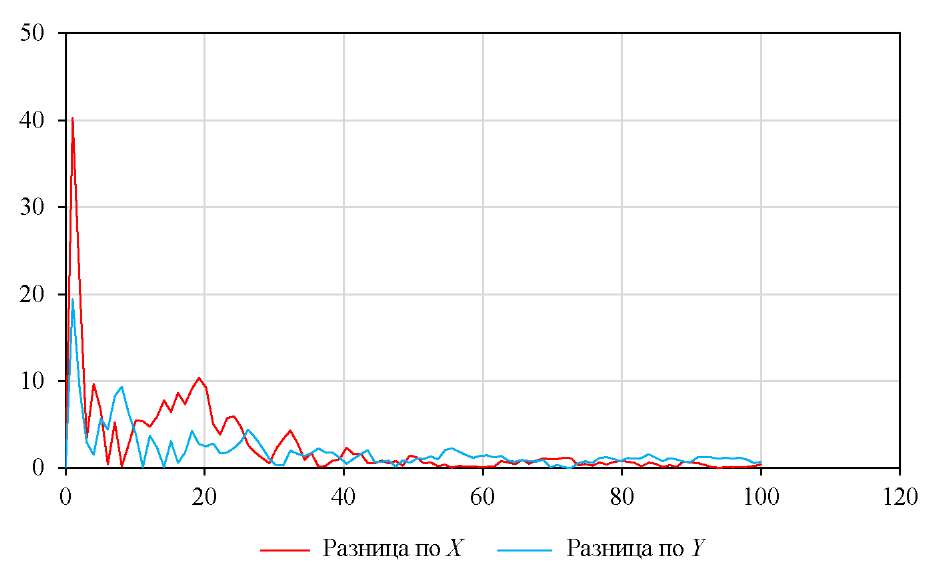
Рис. 4. Погрешность (%) при замере на полукруге
Качество отображения поведения ПРТК в цифровом двойнике оценивали в ходе экспериментов, включающих прямолинейное движение, разворот на месте, траекторию с поворотами. Параллельно записывались данные с реальных сенсоров и сравнивались с параметрами модели в Unity. Результаты замеров и сравнений представлены в таблице 2.
Таблица 2
Показатели отклонений
|
Метрика |
Значение |
|
Максимальное отклонение X |
5,3 мм |
|
Максимальное отклонение Y |
4,8 мм |
|
Среднее угловое отклонение |
3,5° |
Цифровой двойник визуализировали в среде Unity. Этот гибкий 3D-движок позволяет встраивать потоки данных с физических сенсоров, отображать пространственные перемещения, ориентацию, а также создавать сценарии взаимодействия с внешней средой (рис. 5).

Рис. 5. Программа управления робототехническим комплексом
Данные с физических сенсоров (акселерометров, гироскопов, энкодеров) передавались через COM-порт (англ. communications port) с применением пользовательского скрипта на C#. Входящие данные разделялись по каналам и отображались как параметры объекта-двойника.
Цифровая модель в Unity использует ту же координатную систему и ту же структуру управления, что и реализованная математическая модель. Ее функции:
Решение позволяет создать замкнутый цикл «модель — реальность — визуализация» и обеспечивает согласованность между цифровым двойником и физической системой (рис. 6).
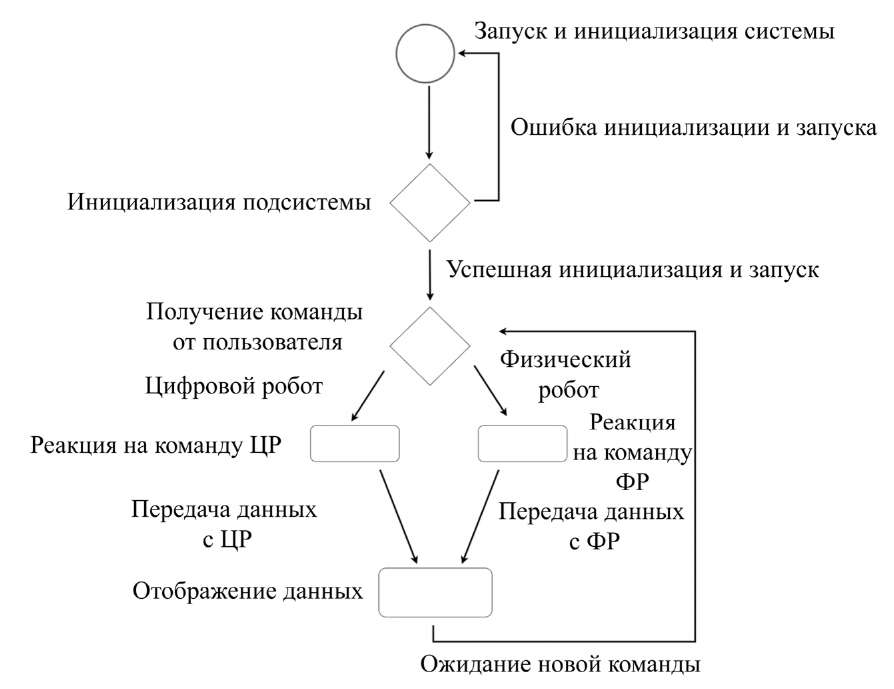
Рис. 6. Алгоритм работы программного обеспечения: ЦР — цифровой робот; ФР — физический робот
Ниже перечислены элементы алгоритма работы программного обеспечения.
Запуск и инициализация системы. Физический робот включается и через USB подключается к компьютеру, который собирает и анализирует данные, запускает главную программу и выполняет инициализацию дополнительных скриптов:
Все это происходит в Unity, после чего система готова к работе.
Инициализация робота. После запуска программы устанавливается ее связь с физическим роботом. Следовательно, происходит калибровка, а затем запускаются датчики и модули: гироскоп, акселерометр, энкодеры, вольтметр, амперметр. В Unity отправляется контрольное сообщение о готовности робота к запуску и старте передачи данных. После этого наступает этап ожидания команд.
Получение команды от пользователя. Анализируется и обрабатывается значение вводимого в программу пользовательского интерфейса. Передается сообщение промежуточным скриптам для выполнения действий цифрового и физического робота.
Реакция на команду цифрового робота. Введенные значения и действия записываются в память компьютера. На основе заложенных алгоритмов выполнения команд и математической модели цифровой робот движется в цифровом пространстве. При этом фиксируются данные о его положении, скорости и пройденном расстоянии. После выполнения команды робот сохраняет положение и ориентацию в пространстве.
Реакция на команду физического робота. Данные передаются на микроконтроллер Arduino Mega. Здесь они анализируются и в зависимости от введенной команды и значения задействуют скрипты, отвечающие за работу датчиков: левого и правого энкодера, акселерометра и гироскопов. Только после этого начинается движение по команде пользователя. В процессе выполнения команды робот фиксирует свое положение и ориентацию в пространстве и передает данные в программу пользовательского интерфейса, где данные визуализируются при помощи 3D-модели, привязанной к физическому роботу.
Сбор и отображение данных. На этом этапе данные о положении, углах наклонов, пройденном расстоянии и других параметрах собираются с цифрового и физического робота и визуализируются в программе пользовательского интерфейса. После этого программа ждет новую команду.
Описанный алгоритм основан на классических принципах замкнутых систем управления с обратной связью. Использование данных с сенсоров (акселерометров, гироскопов, энкодеров) позволило реализовать элемент измерителя в общем структурном виде систем управления. Математическая модель, интегрированная в Unity, выступила в роли наблюдателя, отслеживающего поведение системы и позволяющего визуально верифицировать корректность выполнения команд.
Система проектировалась с учетом:
В формулах (17)–(19) представлены показатели, которые использовались для анализа точности цифрового двойника.
Абсолютная ошибка положения (в мм):
 (17)
(17)
Среднеквадратичная ошибка ориентации (в градусах):
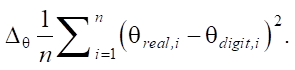 (18)
(18)
Процентное отклонение финального положения:
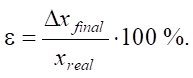 (19)
(19)
В результате экспериментов и анализа показаний датчиков получены дополнительные параметры, характеризующие погрешность разрабатываемой системы (таблица 3).
Таблица 3
Выявленные погрешности системы
|
Параметр |
Значение |
|
Средняя ошибка по Х |
3,11 мм |
|
Средняя ошибка по Y |
2,92 мм |
|
Средняя ошибка угла Z |
1,8о |
|
Максимальное отклонение |
5,3 мм |
|
Время реакции |
<100 мс |
Цифровой двойник устойчив к незначительным флуктуациям в данных благодаря следующим факторам:
Обсуждение и заключение. Разработана и экспериментально подтверждена модель цифрового двойника робототехнического комплекса, основанная на интеграции сенсорных данных, математического моделирования и 3D-визуализации. Реализовано устойчивое управление и отслеживание поведения ПРТК. Представлены результаты сравнительного анализа цифровой модели и реальной системы. Итоги сопоставления доказали:
Построенная модель позволяет адекватно оценивать текущее состояние и прогнозировать поведение ПРТК в условиях неопределенности. ПИД-регуляторы обеспечивают устойчивость при управлении, а визуализация в Unity дает возможность реализовать цифровой двойник как интерфейс взаимодействия с системой. Дальнейшее развитие этого решения может быть связано с внедрением адаптивных и нейросетевых методов управления.
1. Мешков А.В., Громов В.С. Формирование траектории цифрового двойника многозвенного механизма с использованием адаптивного алгоритма оценки параметров нелинейного движения. Научно-технический вестник информационных технологий, механики и оптики. 2022;22(5):889–895. https://doi.org/10.17586/2226-1494-2022-22-5-889-895
2. Кубриков М.В. Цифровой двойник в системе внешнего адаптивного управления роботамиманипуляторами. Космические аппараты и технологии. 2023;7(2):171–176. https://doi.org/10.26732/j.st.2023.2.10
3. Кузьменко В.П., Соленый С.В. Разработка модели цифрового двойника для гибридной производственной линии по сборке светодиодных осветительных приборов. Известия высших учебных заведений. Приборостроение. 2022;65(10):725–734. https://doi.org/10.17586/0021-3454-2022-65-10-725-734
4. Jingsong Fan, Xiangqiang Zhong, Zhimin Di, Huajie Fang. Collaborative Operation of 6-DOF Industrial Robot Based on Digital Twin. Journal of Physics: Conference Series. 2022;2206(1):012019. https://doi.org/10.1088/1742-6596/2206/1/012019
5. Farhadi A, Lee S, Hinchy EP, O'Dowd N, McCarthy CT. The Development of a Digital Twin Framework for an Industrial Robotic Drilling Process. Sensors. 2022;22(19):7232. https://doi.org/10.3390/s22197232
6. Qinglei Zhang, Run Xiao, Zhen Liu, Jianguo Duan, Jiyun Qin. Process Simulation and Optimization of Arc Welding Robot Workstation Based on Digital Twin. Machines. 2023;11(1):53. https://doi.org/10.3390/machines11010053
7. Hang Wu, Zhaoming Liu, Long Cui, Lirong Guan, Hongwei Wang. Digital Twin of Non-Ferrous Metal Casting Robot. In book: M Chen, et al (eds). Advances in Machinery, Materials Science and Engineering Application. Amsterdam: IOS Press; 2022. 760 p. https://doi.org/10.3233/ATDE220502
8. Chancharoen R, Chaiprabha K, Wuttisittikulkij L, Asdornwised W, Saadi M, Phanomchoeng G. Digital Twin for a Collaborative Painting Robot. Sensors. 2022;23(1):17. https://doi.org/10.3390/s23010017
9. Banic MS, Simonovic M, Stojanović L, Rangelov D, Miltenovic A, Perić M. Digital Twin Based Lightweighting of Robot Unmanned Ground Vehicles. Facta Universitatis. Series: Automatic Control and Robotics. 2022;21(3):188. https://doi.org/10.22190/FUACR221121015B
10. Xin Liu, Du Jiang, Bo Tao, Guozhang Jiang, Ying Sun, Jianyi Kong, et al. Genetic Algorithm-Based Trajectory Optimization for Digital Twin Robots. Frontiers in Bioengineering and Biotechnology. 2022;9:793782. http://doi.org/10.3389/fbioe.2021.793782
11. Garg G, Kuts V, Anbarjafari G. Digital Twin for FANUC Robots: Industrial Robot Programming and Simulation Using Virtual Reality. Sustainability. 2021;13(18):10336. http://doi.org/10.3390/su131810336
12. Đoàn Thanh Xuân, Tran Van Huynh, Thanh-Hung Nguyen, Vu Toan Thang. Applying Digital Twin and Multi-Adaptive Genetic Algorithms in Human–Robot Cooperative Assembly Optimization. Applied Sciences. 2023;13(7):4229. http://doi.org/10.3390/app13074229
13. Sichao Liu, Xi Vincent Wang, Lihui Wang. Digital Twin-Enabled Advance Execution for Human-Robot Collaborative Assembly. CIRP Annals — Manufacturing Technology. 2022;71(1):25–28. http://doi.org/10.1016/j.cirp.2022.03.024
14. Kibira D, Weiss BA. Towards a Digital Twin of a Robot Workcell to Support Prognostics and Health Management. In: Proc. 2022 Winter Simulation Conference at Singapore. New York: IEEE; 2022. P. 2968–2979. http://doi.org/10.1109/WSC57314.2022.10015371
15. Xuan Liu, He Gan, Ying Luo, YangQuan Chen, Liang Gao. Digital-Twin-Based Real-Time Optimization for a Fractional Order Controller for Industrial Robots. Fractal and Fractional. 2023;7(2):167. http://doi.org/10.3390/fractalfract7020167
Михаил Дмитриевич Гладышев, аспирант направления «Системный анализ, управление и обработка информации, статистика»
414056, г. Астрахань, ул. Татищева, 20А
Алексей Владимирович Рыбаков, кандидат физико-математических наук, доцент, кафедра «Информационных технологий», доцент, кафедра «Технологии материалов и промышленной инженерии»
414056, г. Астрахань, ул. Татищева, 20А
Разработан метод прогнозирования динамики подводного робототехнического комплекса. Представлена система цифрового двойника, интегрирующая сенсорные данные с математическим моделированием. Проведены эксперименты, подтверждающие высокую точность и устойчивость модели в условиях неопределенности. Визуализация в Unity улучшает взаимодействие с системой и позволяет проводить сравнительный анализ. Результаты показывают перспективность применения цифровых двойников для автономных систем в сложных средах.
Гладышев М.Д., Рыбаков А.В. Интеграция сенсорных данных и математическое моделирование поведения подводного робота с использованием цифрового двойника. Advanced Engineering Research (Rostov-on-Don). 2025;25(2):142-151. https://doi.org/10.23947/2687-1653-2025-25-2-142-151. EDN: LDXARH
Gladyshev M.D., Rybakov A.V. Integration of Sensor Data and Mathematical Modeling of Underwater Robot Behavior Using a Digital Twin. Advanced Engineering Research (Rostov-on-Don). 2025;25(2):142-151. https://doi.org/10.23947/2687-1653-2025-25-2-142-151. EDN: LDXARH



ISSN 2687-1653 (онлайн)
Связаться с: Издателем / Редакцией журнала
Издатель: Донской государственный технический университет - ДГТУ, Ростов-на-Дону, Россия - https://donstu.ru/
Главный редактор: доктор технических наук, профессор, проректор Донского государственного технического университета Бескопыльный Алексей Николаевич






































