




Содержание
Перейти к:
https://doi.org/10.23947/2687-1653-2023-23-4-346-355
EDN: INDAIS
Перейти к:
Введение. Проектирование систем управления движением мобильных роботов требует построения математических моделей. Исследователи неоднократно обращались к этой теме. В частности, опубликованы работы, посвященные расчетам мультифизических процессов, моделированию движения различных видов колес в тех или иных условиях. Кроме того, рассматривались динамика деформируемых контактирующих тел при скольжении, качении и вращении, вопросы автономности и управляемости мобильных роботов. Отметим, что динамика и точность позиционирования колесных роботов во многом определяется трением. В литературе не представлены исследования динамики робота с дифференциальным приводом с учетом взаимосвязей эффектов трения скольжения, верчения и качения на основе теории поликомпонентного трения. Изыскания в этой области способны выявить новые динамические эффекты. Основываясь на полученных таким образом данных, можно заняться повышением точности позиционирования при построении математических моделей управления. Цель представленной работы — исследовать движение автоматического устройства с дифференциальным приводом с учетом трех моделей контакта: неголономного, кулоновского трения и поликомпонентного.
Материалы и методы. В качестве базовой приняли схему двухколесного робота с дифференциальным приводом и безотрывным движением по опорной поверхности. Перемещение устройства обеспечивалось программным управлением. Динамику описали в виде уравнений Аппеля. Для вычислений использовали математические модели, по-разному учитывающие трение. Координация действий механизма формировалась на динамическом уровне. Управляющие воздействия — моменты двигателей колес. При визуализации исследуемых моделей задействовали встроенные численные методы системы Wolfram Mathematica («Вольфрам математика») с минимальной точностью 10–6.
Результаты исследования. При построении математической модели определили равенства для угловых скоростей колес. Учли наличие площадки контакта и вывели уравнения динамики робота с дифференциальным приводом. Элементами системы были проекции силы и момент, показатели верчения платформы, массы, угловые ускорения и инерция колес. Показали, как формируются управляющие воздействия в рамках неголономной механики. Описали модель двигателей, которые создают момент управления на ведущих колесах. Вывели решение как взаимосвязь индуктивности проводников электродвигателей и работы электропитания. Детально рассмотрели три модели, описывающие динамику робота с дифференциальным приводом. Первая — неголономная. Вторая и третья включали систему уравнений динамики робота с дифференциальным приводом для общего случая, при наличии площадки контакта. При этом во второй модели игнорируется время переключений в двигателе и задействуется трение Кулона. В третьей ввели параметр, определяющий скорость переходных процессов в двигателе, и задействовали разложения Паде. Это модель с поликомпонентным трением. Итоги расчетов показали в виде графиков. На них исследуемые модели визуализировали в виде кривых разного цвета. Сопоставление графиков показало, в каких случаях после завершения переходных процессов управление обеспечит требуемую точность.
Это модели 1 и 2. В модели 3 программное управление генерирует ошибку в угловой скорости вращения платформы. Данную ошибку нельзя спрогнозировать в рамках 1-й и 2-й модели. Во всех рассмотренных системах скорость скольжения колес в поперечном направлении падает до нуля. Получено и обосновано условие безотрывного движения опорного колеса.
Обсуждение и заключение. Программное управление допустимо в моделях, не учитывающих трение колес при одновременном скольжении, верчении и качении (общий случай пространственного движения). Однако важно учитывать взаимосвязь данных процессов и поликомпонентного трения. Это необходимо для более точного выполнения роботом программных движений. Установлено, что программное управление в модели, учитывающей трение верчения и качения, приводит к отклонениям от программных значений угловой скорости платформы. Полученные результаты можно использовать при построении системы управления с прогнозирующими моделями.
Салимов М.С., Меркурьев И.В. Программное управление движением робота с дифференциальным приводом при разных моделях трения. Advanced Engineering Research (Rostov-on-Don). 2023;23(4):346-355. https://doi.org/10.23947/2687-1653-2023-23-4-346-355. EDN: INDAIS
Salimov M.S., Merkuryev I.V. Software Control of the Movement of a Differential Drive Robot for Different Friction Models. Advanced Engineering Research (Rostov-on-Don). 2023;23(4):346-355. https://doi.org/10.23947/2687-1653-2023-23-4-346-355. EDN: INDAIS
Введение. В современном мире растет востребованность автоматических мобильных колесных аппаратов, активно исследуются возможности координации их работы. Значительный научный и прикладной интерес имеют вопросы автономности и управляемости мобильных роботов. В частности, рассматриваются подходы к расчетам мультифизических процессов, моделированию движения конкретных видов колес в разных условиях. Некоторые изыскания фокусируются на динамике деформируемых контактирующих тел при скольжении, качении и вращении. Результаты этих исследований находят применение в робототехнике [1–3]. Управление мобильными колесными аппаратами рассматривается на примере электрических самокатов «Сигвей» (Segway) [4].
Мобильные механизмы с простыми и эффективными системами управления движением колес нужны в первую очередь для работы в узких пространствах [5], для проведения исследований в сложных промышленных условиях [6].
В [7–11] показаны возможности точного моделирования динамики колесных аппаратов с учетом скольжения, верчения и качения колес.
При этом в литературе не описаны явления, возникающие при комбинации эффектов трения. Цель представленной работы — исследовать влияние поликомпонентного трения на динамику робота с дифференциальным приводом. Задачи: построить математическую модель движения робота с поликомпонентным трением и смоделировать программные движения.
Материалы и методы. Рассматривается схема двухколесного робота с дифференциальным приводом (рис. 1). Предполагается безотрывное движение колес радиуса R по опорной поверхности.
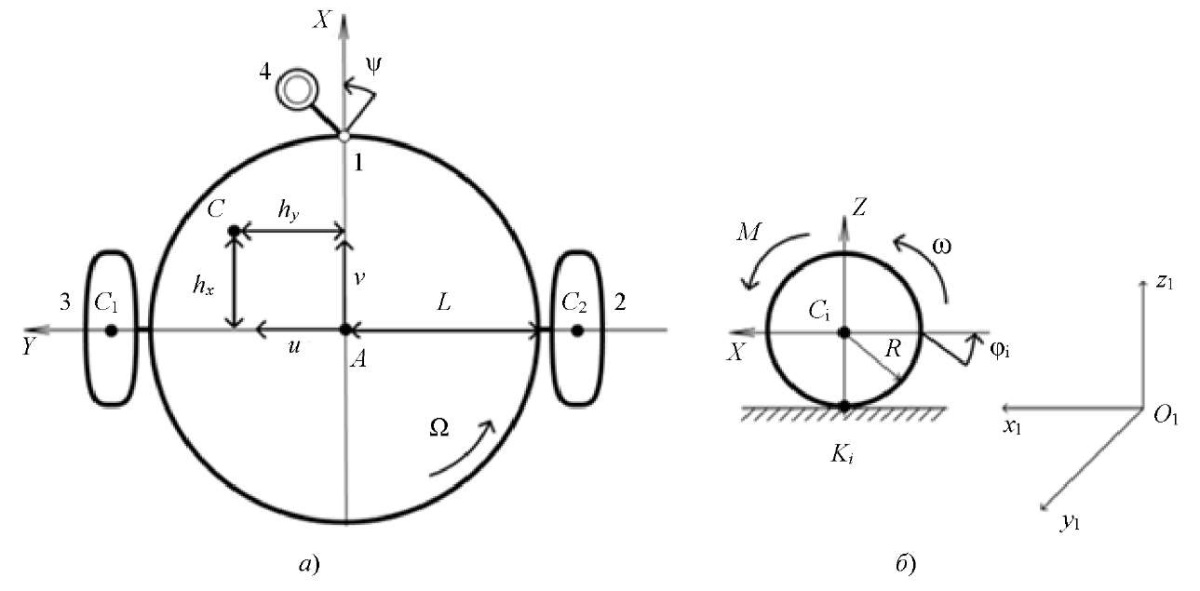
Рис. 1. Кинематическая схема робота:
а — платформа; б — одно из ведущих колес
Центр тяжести платформы C смещен относительно геометрического центра платформы A по оси X на расстояние  , по оси Y — на расстояние
, по оси Y — на расстояние  . Точки
. Точки  и
и  — центры масс колес (индекс 1 соответствует левому колесу, индекс 2 — правому).
— центры масс колес (индекс 1 соответствует левому колесу, индекс 2 — правому).
Вводятся следующие обозначения:
 — масса платформы робота;
— масса платформы робота;
 — момент инерции платформы относительно центра масс C;
— момент инерции платформы относительно центра масс C;
 — неподвижная система координат;
— неподвижная система координат;
 определяют положение точки A в
определяют положение точки A в  ;
;
y — угол курса платформы;
 — углы поворота колес (индекс 1 соответствует левому колесу, индекс 2 — правому);
— углы поворота колес (индекс 1 соответствует левому колесу, индекс 2 — правому);
 — расстояние между колесами;
— расстояние между колесами;
 — моменты двигателей, приложенные к колесам.
— моменты двигателей, приложенные к колесам.
Предполагается, что на опорное колесо 4 (рис. 1) действует только нормальная реакция опоры. Во время движения опорное колесо располагается на оси X на расстоянии ![]() от центра платформы
от центра платформы 
Результаты исследования
Математическая модель динамики робота. При описании движения робота с дифференциальным приводом в рамках неголономной механики применяются выражения, которые учитывают ограничения, связанные с отсутствием скольжения колес по отношению к поверхности:
 (1)
(1)
где  — проекции на оси Х и Y скоростей точек
— проекции на оси Х и Y скоростей точек  , являющихся центрами площадок контакта колес с опорной поверхностью.
, являющихся центрами площадок контакта колес с опорной поверхностью.
Отметим, что для неголономной модели предполагается точечный контакт колес с поверхностью, т.е. площадка контакта каждого колеса вырождается в единственную точку контакта.
Рассмотрим выражения:
 (2)
(2)
С их помощью можно получить равенства для угловых скоростей колес:
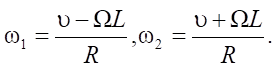 (3)
(3)
В общем случае, когда предполагается наличие площадки контакта, получим уравнения динамики робота с дифференциальным приводом:
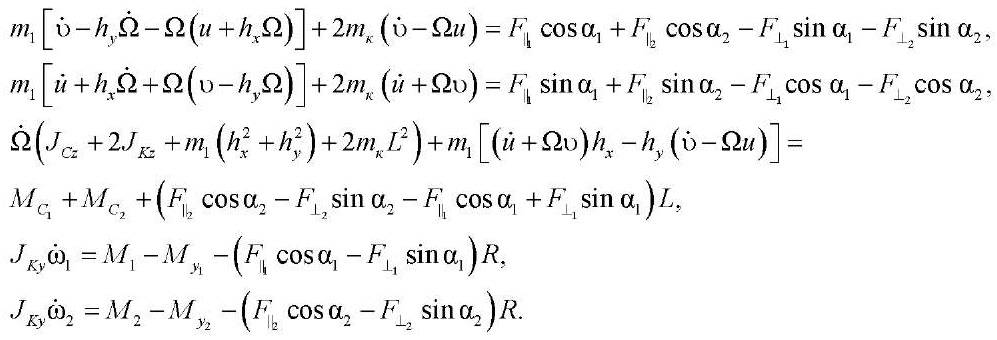 (4)
(4)
Здесь
 — проекции силы трения на направления скоростей скольжения центров пятен контакта колес;
— проекции силы трения на направления скоростей скольжения центров пятен контакта колес;
 — проекции силы трения на направления, перпендикулярные скоростям центров пятен контакта колес;
— проекции силы трения на направления, перпендикулярные скоростям центров пятен контакта колес;
 — слагаемые момента трения при верчении для двух колес;
— слагаемые момента трения при верчении для двух колес;
 — угловое ускорение верчения платформы;
— угловое ускорение верчения платформы;
 — угловые ускорения колес, проецируемые на их ось вращения;
— угловые ускорения колес, проецируемые на их ось вращения;
 — масса каждого колеса;
— масса каждого колеса;
 и
и  — моменты инерции колеса относительно соответствующих осей.
— моменты инерции колеса относительно соответствующих осей.
Для формирования управляющих воздействий будем использовать модель динамики робота, описанного в рамках неголономной механики [12]:

 (5)
(5)
Ее также можно представить в виде:
 (6)
(6)
где  и
и  — левые части уравнения (5).
— левые части уравнения (5).
Модель двигателей на ведущих колесах. Опишем модель двигателей, способных генерировать момент управления на ведущих колесах 
Уравнения движения колесных двигателей постоянного тока можно выразить формулами [13]:
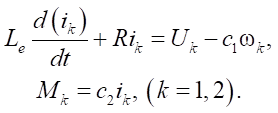 (7)
(7)
Здесь
 — индуктивность проводников электродвигателей;
— индуктивность проводников электродвигателей;
R — сопротивление электрическому току в цепи двигателя;
 — электропитание для двигателя k;
— электропитание для двигателя k;
 — ток, проходящий через цепь якоря двигателя;
— ток, проходящий через цепь якоря двигателя;
 — конструкционные постоянные двигателей.
— конструкционные постоянные двигателей.
Предполагается, что двигатели ведущих колес имеют одинаковую характеристику. Из (7) видно, что
 (8)
(8)
Учитывая (8), в первом уравнении из системы (7) получим дифференциальное уравнение относительно момента 
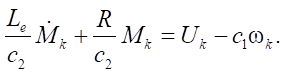 (9)
(9)
Уравнение (9) разделим на множитель  и получим:
и получим:
 (10)
(10)
Введем обозначения:
 (11)
(11)
В таком случае управляющие моменты можно описать:
 (12)
(12)
где
 — константы;
— константы;
 — параметр, определяющий скорость переходных процессов в электрической части двигателей.
— параметр, определяющий скорость переходных процессов в электрической части двигателей.
При игнорировании времени переключений в электромеханической системе двигателя:
 (13)
(13)
Авторы [14] получили похожие формулы.
Исследуемые модели. Рассмотрим модели, описывающие динамику робота с дифференциальным приводом.
Модель 1 описывается уравнениями (6) и (12), когда длительность переходных процессов полагается исчезающе малой 

 (14)
(14)
Здесь  вычисляются по формулам (3).
вычисляются по формулам (3).
Для описания модели 2 применяются уравнения (4), (13), а также модель трения Кулона:
 (15)
(15)
Модель 3 представлена уравнениями (4), (12). Кроме того, учитывается поликомпонентное трение, представленное в [12] с помощью разложений Паде:
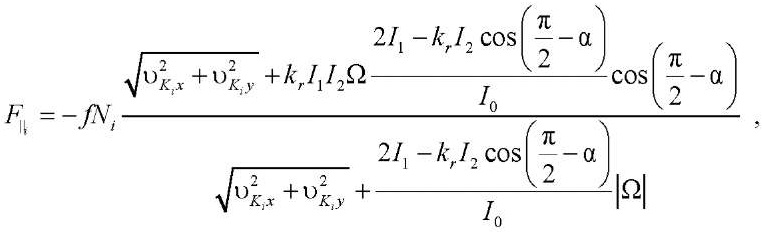 , (16)
, (16)
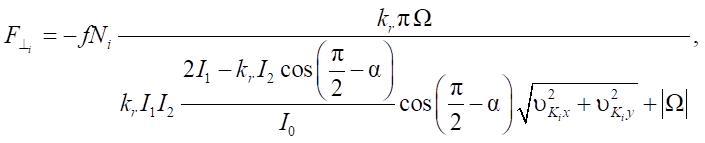 (17)
(17)
 (18)
(18)
 (19)
(19)
Здесь
 — постоянные величины, которые находятся по формулам в [12];
— постоянные величины, которые находятся по формулам в [12];
α — угол, характеризующий направление линейных скоростей скольжения относительно точек контакта колес 
 — коэффициент, знак которого зависит от направления качения.
— коэффициент, знак которого зависит от направления качения.
Для определения программного управления следует указать законы движения робота  По (5) можно выразить величины
По (5) можно выразить величины 
 в зависимости от времени. Используем известные значения
в зависимости от времени. Используем известные значения  для вычисления управляющих напряжений
для вычисления управляющих напряжений  и
и  , подаваемых на приводы колес:
, подаваемых на приводы колес:
 (20)
(20)
Движение системы с заданными начальными условиями  смоделировали в математическом пакете «Вольфрам математика» (Wolfram Mathematica).
смоделировали в математическом пакете «Вольфрам математика» (Wolfram Mathematica).
Рассмотрим  Для интеграции системы автоматически выбирали шаг интегрирования и задействовали встроенные численные методы Wolfram Mathematica с точностью результатов не менее 10–6.
Для интеграции системы автоматически выбирали шаг интегрирования и задействовали встроенные численные методы Wolfram Mathematica с точностью результатов не менее 10–6.
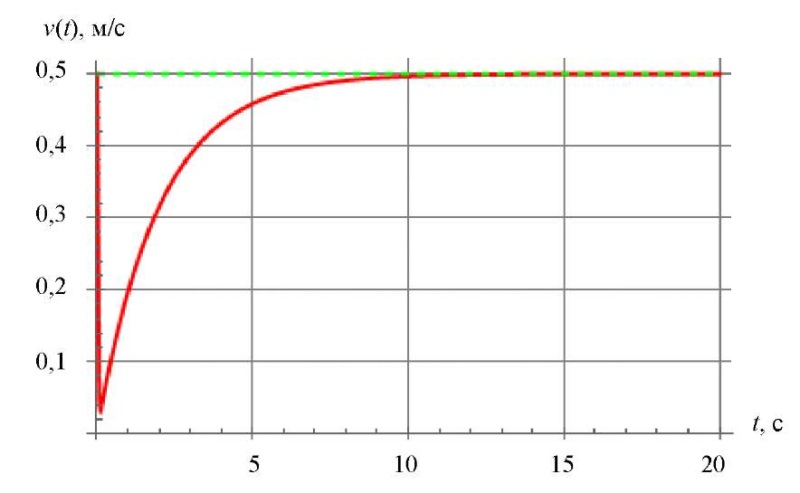
Рис. 2. Зависимость продольной скорости  .
.
Зеленая кривая — неголономная модель 1,
красная кривая — модель 2 с трением Кулона,
синяя кривая — модель 3 с поликомпонентным трением.
Синяя и красная кривые совпадают
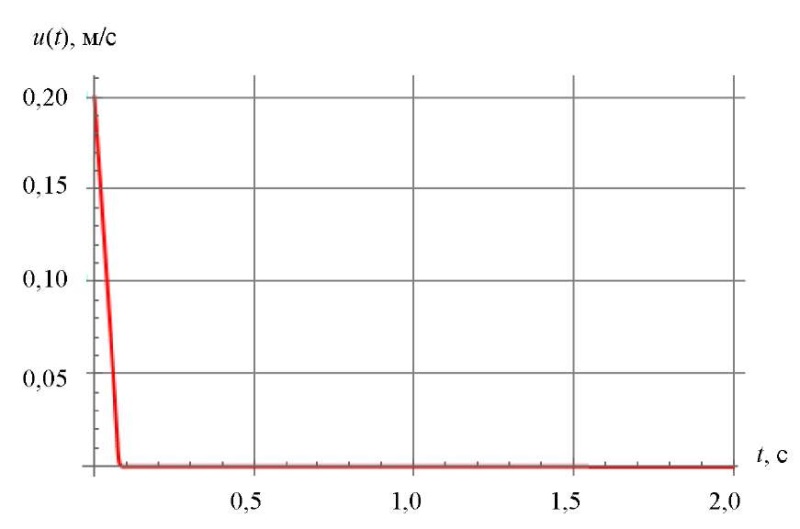
Рис. 3. Зависимость поперечной скорости u.
Зеленая кривая — неголономная модель 1,
красная кривая — модель 2 с трением Кулона,
синяя кривая — модель 3 с поликомпонентным трением.
Зеленая, синяя и красная кривые совпадают
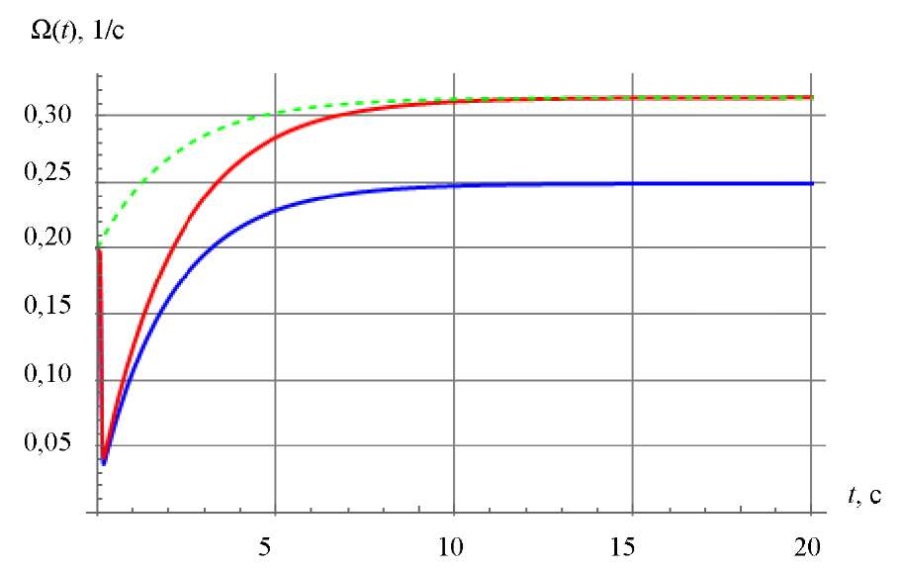
Рис. 4. Зависимость угловой скорости робота.
Зеленая кривая — неголономная модель 1,
красная кривая — модель 2 с трением Кулона,
синяя кривая — модель 3 с поликомпонентным трением
Из рис. 2 и 4 видно, что управление гарантирует точную реализацию программных законов движения после завершения переходных процессов в моделях 1 (неголономная) и 2 (с трением Кулона). В модели 3 (поликомпонентное трение скольжения, качения и верчения) после завершения переходных процессов из-за программного управления возникает постоянная ошибка в угловой скорости вращения платформы. Во всех рассмотренных моделях скорость скольжения колес в поперечном направлении быстро снижается до нуля. Случаи совпадения зависимостей, полученных для разных моделей, показаны на рис. 2 и 3.
Для проверки выполнения условий безотрывного движения опорного колеса запишем теорему изменения кинетического момента системы в проекциях на ось Y:

Согласно (4):

Из последнего уравнения получаем условие безотрывного движения опорного колеса:

С учетом (5):

Ускорения робота не превышали 1 м/c2, поэтому данное неравенство выполняется в каждый момент времени.
Обсуждение и заключение. Итоги моделирования позволили сделать ряд выводов. Программное управление, основанное на неголономной модели 1, приемлемо для роботов, конструкция которых не учитывает контактное трение колес, возникающее при комбинации скольжения, верчения и качения. Однако при формировании управляющих воздействий для достижения более точного следования программным законам движения необходимо учитывать модель поликомпонентного трения. Полученное решение можно использовать при построении системы управления с прогнозирующей моделью (model predictive control). Такая разработка будет предметом дальнейшего исследования.
1. Gerasimov K.V., Zobova A.A., Kosenko I.I. Omni-Vehicle Dynamical Models Mutual Matching for Different Roller-Floor Contact Models. In: Proc. European Congress on Computational Methods in Applied Sciences and Engineering “Multibody Dynamics”. Cham: Springer; 2019. P. 511–517. http://doi.org/10.1007/978-3-030-23132-3_61
2. Zobova A.A., Habra T., Van der Noot N., Dallali H., Tsagarakis N.G., Fisette P., et al. Multi-Physics Modelling of a Compliant Humanoid Robot. Multibody System Dynamics. 2017;39:95–114. https://doi.org/10.1007/s11044-016-9545-4
3. Gerasimov K.V., Zobova A.A. On the Motion of a Symmetrical Vehicle with Omniwheels with Massive Rollers. Mechanics of Solids. 2018;53:32–42. https://doi.org/10.3103/S0025654418050060
4. Corke P. Robot Arm Kinematics. In book: Robotics, Vision and Control, 2nd ed. Cham: Springer; 2017. P. 193–228. https://doi.org/10.1007/978-3-319-54413-7_7
5. Junjie Shen, Dennis Hong. OmBURo: A Novel Unicycle Robot with Active Omnidirectional Wheel. In: Proc. IEEE Int. Conf. on Robotics and Automation (ICRA). New York City: IEEE; 2020. P. 11–19. https://doi.org/10.1109/ICRA40945.2020.9196927
6. Munitsyn L.V. Vibrations of a Rigid Body with Cylindrical Surface on a Vibrating Foundation. Mechanics of Solids. 2017;52:675–685. https://doi.org/10.3103/S0025654417060073
7. Goryacheva I.G., Zobova A.A. Dynamics of Deformable Contacting Bodies with Sliding, Rolling, and Spinning. International Journal of Mechanical Sciences. 2022;216:106981. https://doi.org/10.1016/j.ijmecsci.2021.106981
8. Zobova A.A., Goryacheva I.G. Effect of Contacting Bodies’ Mechanical Properties on the Dynamics of a Rolling Cylinder. Acta Mechanica. 2020;232:1971–1982. http://doi.org/10.1007/s00707-020-02800-w
9. Киреенков А.А., Жаворонок С.И., Нуштаев Д.В. О моделях шины, учитывающих как деформированное состояние, так и эффекты сухого трения в области контакта. Компьютерные исследования и моделирование. 2021;13(1):163–173. https://doi.org/10.20537/2076-7633-2021-13-1-163-173
10. Kireenkov A.A., Zhavoronok S.I. Coupled Dry Friction Models in Problems of Aviation Pneumatics' Dynamics. International Journal of Mechanical Sciences. 2017;127:198–203. http://doi.org/10.1016/j.ijmecsci.2017.02.004
11. Kireenkov A.A., Fedotenkov G.V., Shiriaev A., Zhavoronok S.I. Application of the Theory of the Multicomponent Dry Friction in Some of Control Robot Systems. International Journal for Computational Civil and Structural Engineering. 2022;18(1):14–23. https://doi.org/10.22337/2587-9618-2022-18-1-14-23
12. Salimov M.S., Saypulaev G.R., Merkuriev I.V. Four-Dimensional Integral Model of Dry Friction on the Example of Wheel Movement. Journal of Physics: Conference Series. 2021;2096:012043. https://doi.org/10.1088/1742-6596/2096/1/012043
13. Alaci S., Ciornei F.C., Pentiuc R.D., Ciornei M.C., Românu I.C. Indetermination versus Incompatibility in Dynamic Systems with Dry Friction. Journal of Physics: Conference Series. 2020;1426:012011. https://doi.org/10.1088/1742-6596/1426/1/012011
14. Long Chen, Jun Liu, Hai Wang, Youhao Hu, Xuefeng Zheng, Mao Ye, et al. Robust Control of Reaction Wheel Bicycle Robot via Adaptive Integral Terminal Sliding Mode. Nonlinear Dynamics. 2021;104:2291–2302. https://doi.org/10.1007/s11071-021-06380-9
Максим Сергеевич Салимов, ассистент кафедры робототехники, мехатроники, динамики и прочности машин
111250, г. Москва, ул. Красноказарменная, 14
Игорь Владимирович Меркурьев, доктор технических наук, доцент, заведующий кафедрой робототехники, мехатроники, динамики и прочности машин, ScopusID
111250, г. Москва, ул. Красноказарменная, 14
Салимов М.С., Меркурьев И.В. Программное управление движением робота с дифференциальным приводом при разных моделях трения. Advanced Engineering Research (Rostov-on-Don). 2023;23(4):346-355. https://doi.org/10.23947/2687-1653-2023-23-4-346-355. EDN: INDAIS
Salimov M.S., Merkuryev I.V. Software Control of the Movement of a Differential Drive Robot for Different Friction Models. Advanced Engineering Research (Rostov-on-Don). 2023;23(4):346-355. https://doi.org/10.23947/2687-1653-2023-23-4-346-355. EDN: INDAIS

ISSN 2687-1653 (онлайн)
Связаться с: Издателем / Редакцией журнала
Издатель: Донской государственный технический университет - ДГТУ, Ростов-на-Дону, Россия - https://donstu.ru/
Главный редактор: доктор технических наук, профессор, проректор Донского государственного технического университета Бескопыльный Алексей Николаевич






































