


МЕХАНИКА
Разработаны экологичные фиброгеополимерные составы с высоким модулем упругости. Получены моноармированные и гибридноармированные геополимеры для строительных деталей. Показана достаточная удобоукладываемость смесей для практического применения на строительных площадках. Экспериментальные прочностные характеристики при сжатии и изгибе подтверждены измерениями. Метод конечных элементов эффективно предсказывает прогибы балок из новых композитов. Результаты применимы в промышленном и гражданском строительстве для экономичных и экологичных конструкций.
Введение. Улучшение экологии предполагает переработку техногенных материалов для получения продукции с высокими эксплуатационными характеристиками. Однако в строительстве в целом безальтернативны энергоемкие и неэкономичные материалы. Литературные сведения по проблеме недостаточны и разрознены. Представленная статья призвана восполнить этот пробел.
Цель работы — исследование моноармированных и гибридноармированных фиброгеополимеров. Для достижения цели решались две задачи: проектирование полимеров и анализ балок из них методом конечных элементов.
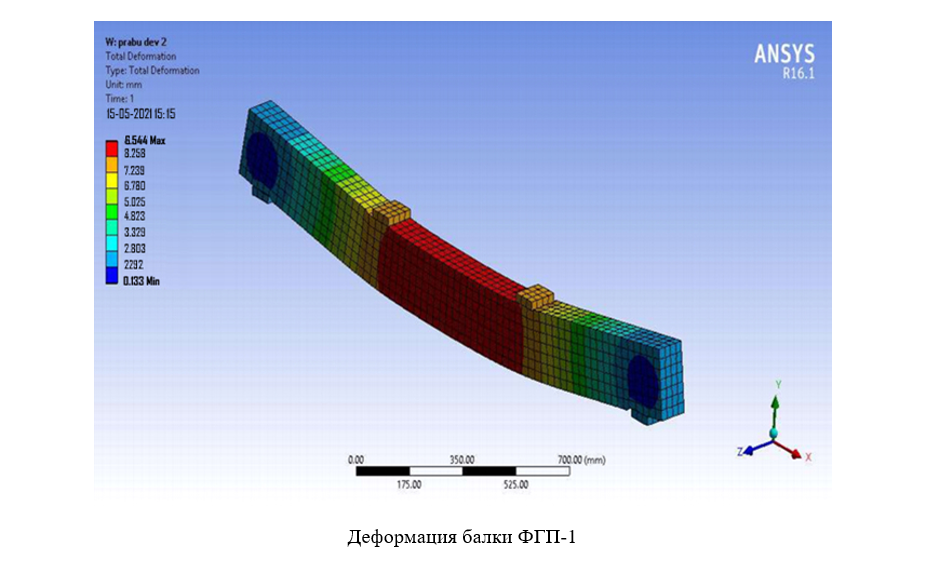
Материалы и методы. Вяжущей основой фиброгеополимеров служили спекшиеся частицы (корольки) из отходов техногенных волокнистых материалов (TBM), а именно из базальтовой ваты. Фибру изготавливали из металлокорда, отходов базальтовой ваты и полипропилена. Балки из гибридноармированных фиброгеополимеров изучали при изгибе и сдвиге в программной среде Ansys 16.1. Результаты исследования. Получены два вида геополимеров: − моноармированные (фибра из металлокорда, полипропиленовая фибра и TBM – фибра из отходов производства базальтовой ваты); − гибриднофиброармированные (металлокорд + полипропилен, металлокорд + TBM, полипропилен + TBM). Выявили высокие значения модуля упругости (более 25 ГПа), прочности при изгибе (до 10,19 МПа) и сжатии (до 46,67 МПа). Отношение прочности при изгибе и сжатии для исследуемых и традиционных материалов — 1:4 и 1:10 соответственно. Сравнили смоделированные и экспериментальные показатели прогибов балок при нагрузках от 5 до 72 кН. Выяснили, что конечноэлементное моделирование позволяет проектировать конструкции из разработанных материалов и прогнозировать их эксплуатационные характеристики.
Обсуждение. Установлены случаи наименьшего расхождения данных моделирования и опытов. Для ФГП-1 это 8 % (нагрузка — 35 кН), для ФГП-2 — 11 % (50 кН), для ФГП-3 — 7 % (38 кН), для ФГП-1 (1 %) — 3 % (30 кН). Среди гибридноармированных фиброгеополимеров наилучшее соответствие — у ГФГП-3. При нагрузке 55 кН расхождение — 0,80 % (теория — 4,98 мм, опыт — 5,02 мм). Для ГФГП-1 лучший показатель — 1,85 % (72 кН, 5,85 мм, 5,96 мм), для ГФГП-2 — 9,12 % (63 кН, 5,58 мм, 6,14 мм). Прикладную ценность результатов подтвердила их визуализация — схожесть и совпадение кривых на графиках.
Заключение. Доказаны преимущества предложенных инновационных компонентов для производства строительных материалов. Они экологичны, демонстрируют достаточную удобоукладываемость. Проектирование гибридноармированных фиброгеополимеров дает возможность получить высокие значения прочности при изгибе и сжатии (существенно выше, чем у неармированных бетонов). Модуль упругости более 25 ГПа доказывает хорошее сопротивление материала деформациям. Итоги моделирования адекватны результатам экспериментов.
Разработан метод оптимального управления экзоскелетом нижних конечностей с упругими элементами в стопах, минимизирующий энергозатраты при учете внешних возмущений и шума измерений. Метод основан на модели Лагранжа и синтезе управления через решение уравнения Риккати. Показано, что увеличение времени стабилизации существенно снижает энергозатраты. Анализ влияния жесткости и демпфирования упругих элементов выявил компромисс между быстротой стабилизации и перерегулированием. Применение фильтра Калмана обеспечивает робастную оценку состояния и устойчивую сходимость при наличии белого шума.
Введение. Современное развитие экзоскелетов открывает новые горизонты для реабилитации и повышения качества жизни людей с ограниченной подвижностью. Актуальность исследования методов оптимального управления экзоскелетами обусловлена растущим спросом в медицине и промышленности. Однако существует множество проблем, связанных с эффективностью управления экзоскелетами, особенно в контексте интеграции упругих элементов. Темы, связанные с оптимальным управлением и настройкой параметров систем для достижения максимальной эффективности и комфорта пользователя, остаются недостаточно изученными. Целью данного исследования является разработка метода оптимального управления экзоскелетом нижних конечностей (ЭНК) с упругими элементами при оптимизации энергозатрат и учете внешних возмущений.
Материалы и методы. ЭНК представлен упрощенной моделью перевернутого маятника с упругими элементами в стопах. Динамическая модель ЭНК разработана с использованием уравнений Лагранжа. Метод оптимального управления основан на синтезе линейно-квадратичного регулятора, ориентированного на минимизацию энергозатрат. Для учета влияния внешних возмущений в контур управления интегрирован фильтр Калмана. Параметры математической модели ЭНК были получены из литературных данных. Моделирование проведено в среде Wolfram Mathematica.
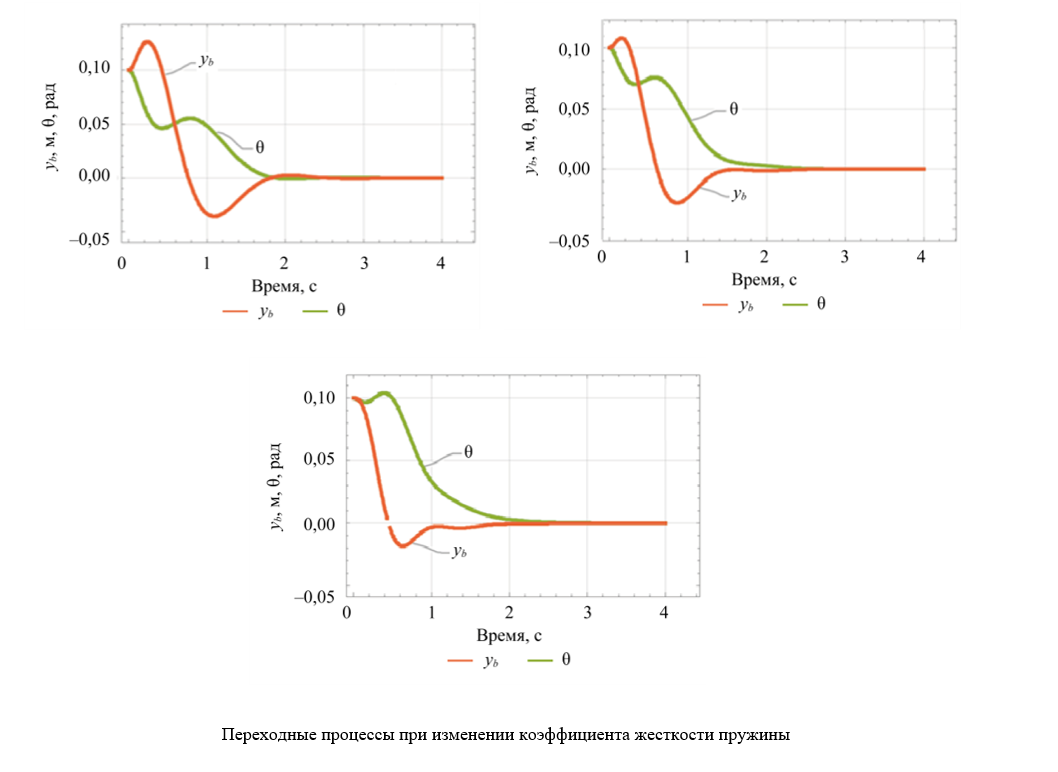
Результаты исследования. Разработан метод оптимального управления ЭНК с упругими элементами, который обеспечивает оптимизацию энергозатрат при достижении вертикального метода равновесия. Проведено моделирование системы с использованием оптимального терминального управления, а затем оптимального управления с обратной связью. При управлении с обратной связью были определены ключевые параметры, оказывающие влияние на устойчивость системы: коэффициенты жесткости пружины и демпфирования. Интеграция фильтра Калмана в систему позволила учитывать влияние внешних возмущений.
Обсуждение. Применение терминального управления в рамках разработанного метода оптимального управления позволило снизить энергозатраты на 98 % за определенное время стабилизации. Найдены оптимальные значения жёсткости пружин и коэффициентов демпфирования для достижения наилучшего отклика системы. Использование метода оптимального управления ЭНК в сочетании с фильтром Калмана подтвердило эффективную компенсацию внешних возмущений и шумов, что обеспечило сходимость переходных процессов при минимальных энергозатратах.
Заключение. Предложенный метод достижения оптимального управления при минимизации энергозатрат является перспективным решением в области расчёта управляющих сигналов, необходимых для обеспечения устойчивости и определения оптимальной функции энергозатрат. Это особенно актуально для задач медицинской реабилитации. Данные результаты могут быть полезны для дальнейших исследований и разработок в области робототехники и носимых устройств.
МАШИНОСТРОЕНИЕ И МАШИНОВЕДЕНИЕ
В статье экспериментально подтверждена адекватность модели длинноходового бесштокового пневмопривода с максимальной погрешностью 18 %. Проведены натурные испытания с оригинальной системой управления на базе струйного датчика и внешнего тормоза. Показано, что увеличение массы от 10 до 60 кг снижает точность позиционирования на 40 %. Установлено сильное влияние координаты остановки на точность из‑за противодавления в сливной полости. Полученные решения обеспечили точность 77 мкм на дистанции свыше трёх метров при экономичной схеме управления.
Введение. В современных промышленных процессах пневматические приводы с длинноходовыми перемещениями играют важную роль. Однако их использование ограничено низкой точностью, вызванной сложностями управления воздушными потоками. Эти ограничения обусловлены сжимаемостью воздуха и термодинамическими процессами, что делает актуальной задачу повышения точности таких систем. Проведённый анализ научной литературы показывает, что современные исследования в основном сосредоточены на применении систем со стандартными цилиндрами, рабочий ход которых ограничен тремя метрами. В то же время вопросы разработки и исследования длинноходовых систем бесштоковых пневмоприводов, способных иметь длину хода до шести метров, остаются недостаточно изученными. Внедрение усовершенствованных систем управления в такие приводы связано со значительными инвестициями в высокотехнологичную электронную базу и дополнительные конструктивные элементы. В связи с этим особую актуальность приобретает разработка принципиально новых технических решений, позволяющих эффективно эксплуатировать механизмы с рабочим ходом более трёх метров при сохранении необходимых технических параметров и экономической эффективности. В рамках предыдущих исследований автором была предложена конструкция пневмопривода длинноходовых перемещений, оснащённая уникальной системой управления на базе струйного датчика и внешнего тормозного механизма; также было выполнено его математическое моделирование и теоретический анализ, что позволило выделить ключевые факторы, влияющие на точность позиционирования. Для подтверждения адекватности математической модели и выдвинутых гипотез целью настоящей работы является экспериментальная верификация результатов математического моделирования позиционного длинноходового бесштокового пневмопривода, а также подтверждение степени влияния ключевых факторов на точность позиционирования.
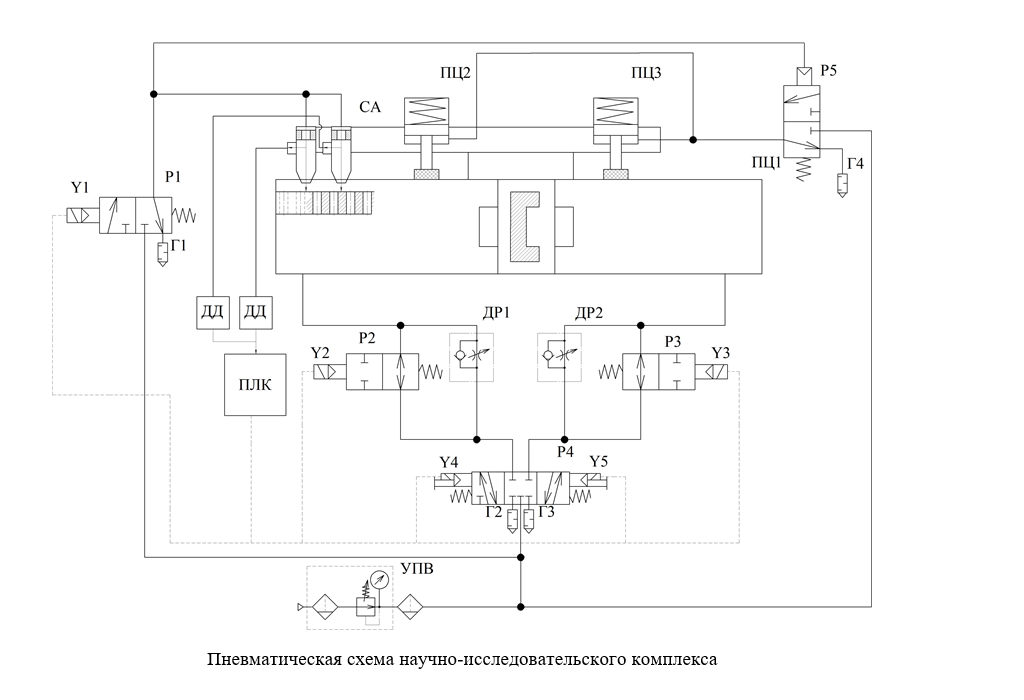
Материалы и методы. В работе был использован стенд, представляющий собой техническую модель пневмопривода с оригинальной системой управления, включающей струйный датчик и внешнее тормозное устройство. Для верификации работоспособности и точности показаний струйного датчика был применён метод проливки с использованием датчика расхода Camozzi MF4008-10-R-BV-A, установленного после исследуемого элемента, а также датчиков давления Camozzi SWCN-P10-P3-2, размещённых перед и после исследуемого элемента. Проведённые испытания разработанного струйного датчика продемонстрировали высокую надёжность и стабильность работы в различных эксплуатационных режимах. Экспериментальное исследование длинноходового бесштокового пневмопривода включало в себя: оценку технических возможностей привода, анализ позиционных циклов, изучение влияния внешних факторов и сравнение результатов вычислительных и натурных экспериментов. С помощью пакета прикладных программ Mathcad и Matlab обрабатывались результаты вычислительного и натурного экспериментов, а также были построены зависимости точности позиционирования от массы и длины хода.
Результаты исследования. Достоверность модели была установлена на уровне максимального расхождения между экспериментальными данными и итогами математического моделирования, составившего 18 %, что подтверждает адекватность разработанной модели для инженерных расчетов. Экспериментально установлено влияние массы груза на точность позиционирования. При увеличении массы с 10 до 30 кг точность снижается в 1,47 раза, а при массе в 60 кг точность ухудшается еще на 1,37 раза относительно базовой массы в 10 кг. Кроме того, исследовано воздействие координат остановки: установлена зависимость точности позиционирования от положения исполнительного элемента. При перемещении от 0,1 м до 0,22 м точность ухудшается в 3,2 раза, однако при дальнейшем перемещении до 0,35 м она улучшается в 2,2 раза.
Обсуждение. Проведенные экспериментальные исследования позволили добиться хороших результатов в области разработки длинноходовых пневмоприводов. Успешная верификация математической модели подтверждает корректность как самой модели, так и теоретических исследований, проведенных в предыдущих работах автора. Достигнута точность позиционирования привода 77 мкм на дистанции свыше трех метров. Этот показатель существенно превосходит результаты, представленные в исследованиях других авторов, что свидетельствует о высоком потенциале разработанной конструкции. Экономическая эффективность предложенного решения обусловлена отсутствием электронной компонентной базы в системе управления. Это не только снижает первоначальные затраты на производство, но и существенно упрощает техническое обслуживание привода в процессе эксплуатации. Сравнительный анализ с существующими разработками подтверждает превосходство предложенной системы по критерию затрат.
Заключение. Проведенные исследования подтвердили эффективность разработанных решений для длинноходового бесштокового пневмопривода. Практическая значимость исследования определяется возможностью применения полученных результатов при создании высокоточных длинноходовых механизмов в различных отраслях промышленности. Разработанная конструкция может быть использована в автоматизированных производственных линиях, робототехнических комплексах и других областях, где требуется точное позиционирование на значительных расстояниях. Перспективными направлениями дальнейших исследований являются оптимизация параметров управляющей системы для достижения еще более высокой точности позиционирования и разработка методик расчета позиционных длинноходовых пневмоприводов.
Разработан экспериментальный подход к оценке влияния взаиморасположения электродов на форму и геометрию наплавленного слоя при расщеплённой дуге. Показано, что увеличение расстояния между электродами расширяет валик, снижает его высоту и увеличивает угол смачивания. Установлено, что осевая глубина проплавления зависит от площади зеркала ванны и изменяется не монотонно с расстоянием между электродами. Результаты помогают оптимизировать параметры многопроволочной наплавки для повышения производительности при сохранении качества.
Введение. Повышение производительности однопроволочной наплавки за счёт увеличения скорости подачи проволоки приводит к дефектам — подрезам и несплавлениям между слоями, что снижает качество наплавленного покрытия и увеличивает брак. Для решения этой проблемы в среде защитных газов развиваются многопроволочные методы наплавки, позволяющие повысить производительность без ухудшения качества. В литературе показано, что взаиморасположение электродов в многопроволочных системах существенно влияет на теплофизические и электрофизические характеристики дуги, а следовательно — на геометрию усиления и форму проплавления. Однако имеющиеся исследования фрагментарны: недостаточно данных по морфологии зоны проплавления и взаимосвязи её параметров с конкретными схемами расположения электродов при наплавке расщеплённой дугой в защитной среде, что оставляет научный пробел. Цель данной работы — оценить изменение геометрических параметров усиления наплавленного слоя и морфологии зоны проплавления при различных взаиморасположениях электродов при наплавке расщеплённой дугой в среде защитного газа.
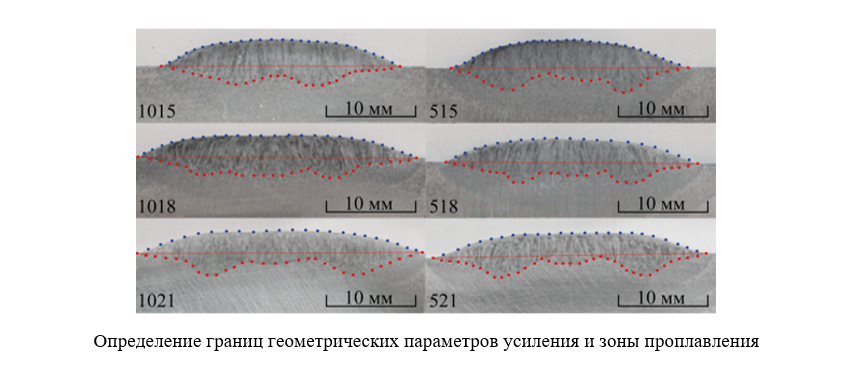
Материалы и методы. Эксперимент проводился на 6-осевом роботе Fanuc 120iD с источником питания EWM Titan XQ500 и экспериментальной наплавочной головкой, состоящей из двух сварочных горелок. Слои наплавлялись на стальные подложки марки Ст3 методом GMAW-Pulse проволокой Св-08Г2С диаметром 1.2 мм в среде Ar/CO₂ (98 %/2 %) при зафиксированном режиме наплавки (WFS = 6,5 м/мин на каждую горелку, TS = 4 мм/с, МВТ = 150 °C). В качестве исследуемых факторов приняты следующие параметры: расстояния между электродами (z = 15, 18, 21 мм), угол их наклона (α = 5°, 10°). На поперечных сечениях наплавленных слоев, подготовленных шлифовкой и травлением, измерялись геометрические параметры усиления (высота h, ширина S, угол смачивания γ) и проплавления (глубины a, a₁, ширина b). Количественный анализ геометрии шва выполнялся с использованием ПО Digimizer для оценки влияния взаиморасположения электродов на формирование слоя.
Результаты исследования. Установлено, что расстояние между электродами (z) существенно влияет на геометрию усиления: увеличение z приводит к росту ширины слоя (S) и угла смачивания (γ), но снижению его высоты (h). Глубина осевого проплавления (a) демонстрирует нелинейную зависимость от z, достигая максимума (~2,2 мм) при z = 18 мм. Угол наклона (α) оказал незначительное влияние (<5 %)на параметры усиления, но существенно повлиял на форму основной зоны проплавления (a₁): увеличение α уменьшало a₁ и делало проплавление более пологим. При z = 21 мм влияние α на проплавление исчезало. Выявлены зависимости между взаиморасположением электродов при наплавке расщеплённой дугой, геометрическими параметрами усиления и глубиной зоны проплавления.
Обсуждение. Объяснение установленных зависимостей основано на изменении теплофизических и электрофизических свойств электрической дуги в зависимости от взаимного расположения электродов. Осевая глубина проплавления зависит не только от расстояния между электродами, но и от объёма сварочной ванны. При избыточном объёме сварочной ванны для конкретного режима наплавки возникает эффект демпфирования тепловых потоков от электрической дуги к основному металлу — объём сварочной ванны поглощает часть тепла, что приводит к уменьшению глубины проплавления. Изменение вектора давления дуги при увеличении угла между электродами объясняет уменьшение глубины основной зоны проплавления.
Заключение. Экспериментально установлены закономерности влияния взаимного расположения электродов на геометрию наплавленного слоя и форму зоны проплавления при наплавке расщеплённой дугой в защитном газе. Показано, что увеличение расстояния между электродами приводит к росту ширины валика, уменьшению его высоты и увеличению угла смачивания. Отмечено, что глубина проплавления зависит от объёма сварочной ванны. Определено, что угол наклона электродов в исследованных режимах оказывал незначительное влияние — менее 5 % — на геометрию наплавленного металла, хотя гипотетически оно может усиливаться при меньших межэлектродных расстояниях. Полученные данные выявляют чёткие тенденции и формируют основу для дальнейшего углублённого изучения теплофизических и электрофизических аспектов процесса наплавки расщеплённой дугой в среде защитного газа.
ИНФОРМАТИКА, ВЫЧИСЛИТЕЛЬНАЯ ТЕХНИКА И УПРАВЛЕНИЕ
Разработан метод восстановления полной трехмерной скелетной позы по ограниченным данным о движении рук. Показано, что ансамбли градиентных деревьев дают лучшие средние ошибки для большинства задач. Показано, что нейросеть CNN-GRU с вниманием улучшает суммарное отклонение в ряде сценариев. Демонстрируется, что данные от первого лица без глубины существенно снижают точность восстановления ног. Показано, что корректировка инверсной кинематикой даёт малое улучшение для отдельных поз. Результаты применимы в виртуальных тренажерах и системах с ограниченным набором датчиков.
Введение. Точная реконструкция модели тела человека крайне важна для визуализации цифровых аватаров в виртуальных тренажерах и реабилитационных системах. Однако использование экзоскелетных систем может привести к перекрытию и экранированию датчиков, что затрудняет работу систем отслеживания. Это подчеркивает актуальность задачи реконструкции модели тела человека на основе ограниченного набора данных о движениях рук, как в сфере реабилитации, так и в спортивной подготовке. Существующие исследования сосредоточены либо на масштабных IMU-сетях, либо на полном видеоконтроле, не рассматривая вопрос реконструкции модели тела на основе данных о движениях рук. Цель данной работы заключается в разработке и тестировании методов машинного обучения, направленных на восстановление координат модели тела с использованием ограниченных данных, например, информации о положении рук.
Материалы и методы. Для проведения исследования была сформирована виртуальная имитационная среда, в которой виртуальный аватар выполнял различные движения. Эти движения фиксировались камерами с видом от первого лица и боковой. В качестве эталонных данных сохранялись положения ключевых точек модели тела относительно точки спины. Рассматривалась задача регрессии, целью которой было восстановление положения рук пользователя в полной модели его тела в пяти различных вариациях, включающих координаты ключевых точек, извлеченные из видео и виртуальной сцены. Задача также подразумевала сравнение различных моделей регрессии, среди которых были линейные модели, деревья решений, ансамбли, а также три глубокие нейронные сети (DenseNN, CNN-GRU, Transformer). Точность оценивалась с использованием MAE и среднего Евклидова отклонения сегментов тела. Проведены экспериментальные исследования на пяти наборах данных, размер которых варьировался от 25 до 180 тысяч кадров.
Результаты исследования. Эксперименты показали, что ансамбли (LightGBM) наиболее эффективны в большинстве ситуаций. Среди нейросетевых моделей наименьшую погрешность обеспечила модель на базе CNN-GRU. Обучение моделей на последовательности из 20 кадров не дало значительного улучшения. Применение модуля инверсной кинематики на ряде сценариев позволяет снизить погрешность до 3 %, но в ряде случаев ухудшает итоговый результат.
Обсуждение. Анализ полученных результатов показал низкую точность реконструкции при использовании наборов данных от компьютерного зрения, а также отсутствие превосходства сложных моделей перед более простыми ансамблями и линейными моделями. Тем не менее, обученные модели позволяют с некоторой погрешностью восстанавливать положение ног пользователя для более достоверного отображения цифровой модели его тела.
Заключение. Полученные данные показывают сложность решения задачи реконструкции модели тела человека при использовании ограниченного объема данных, а также большую погрешность у ряда моделей машинного обучения. Сравнение моделей на различных наборах данных показало низкую применимость данных от первого лица, не содержащих информацию о расстоянии до рук. С другой стороны, использование в качестве входной информации абсолютных значений положения рук позволяет осуществить реконструкцию модели тела со значительно меньшей погрешностью.
Разработана математическая модель для оценки мощности заряда при уплотнении лёссов глубинными взрывами. Модель учитывает физико-механические свойства грунтов и их изотропность или анизотропность. Получены аналитические формулы для случаев с выбросом грунта и без выброса. Проведен численный эксперимент, подтвердивший согласие расчетов с натурными данными. Модель позволяет исключить пробные взрывы и сократить затраты при проектировании уплотнения. Метод применим в проектных и изыскательских организациях при планировании инженерно-технологического процесса.
Введение. Просадочные лёссовые грунты, широко распространённые в России, Китае и Средней Азии, представляют собой значимую проблему в современном строительстве из-за своей склонности к просадке и низкой прочности при внешних нагрузках. Недостаточное внимание к их физико-механическим свойствам может привести к деформации сооружений, что создаёт угрозу безопасности и финансовые потери. Научные исследования в этой области являются фрагментарными и не дают достаточного понимания методов уплотнения и их влияния на долговечность конструкций. Кроме того, не существует разработанных оптимизированных математических моделей, позволяющих предсказать эффективность инженерно-технологических процессов уплотнения. Таким образом, целью данного исследования является разработка математической модели, определяющей мощность заряда взрывчатого вещества для уплотнения лёссов. Данная модель направлена на исключение экспериментального этапа, что улучшает качество уплотнения и способствует экономии финансовых ресурсов в строительстве.
Материалы и методы. Математическое моделирование проводили путём включения решения обратной прикладной задачи оценки мощности заряда взрывчатого вещества при устранении просадочности лёссов. Начальнограничные задачи с полуэмпирическим дифференциальным уравнением в частных производных, описывающим уплотнение лёсса с выбросом и без выброса грунта на поверхность строительной площадки, рассматривались путём анализа конкретных моделей и математических подходов. На основе решения этих задач с использованием аналитического метода была создана математическая модель оценки мощности заряда взрывчатого вещества. Мощность определяли численно двумя методами: расчётами в программе, разработанной на языке Python, и путём моделирования вычислительного эксперимента с оценкой погрешности результата. При этом учитывали влияние физико-механических свойств грунтов, их изотропность и анизотропность.
Результаты исследования. Построена математическая модель мощности заряда взрывчатого вещества при уплотнении просадочных лёссов с использованием глубинных гидровзрывов. Учтены плотность сухого грунта до и после уплотнения, коэффициент вертикальной диффузии, дисперсионные координатные изменения газа в уплотняемом грунте, а также глубина заложения заряда взрывчатого вещества. При средней плотности сухого уплотнённого грунта абсолютная погрешность расчётных значений мощности заряда составила 3,28 г для уплотнения лёссов без выброса и 21,13 г — для ситуации с выбросом грунта на поверхность. Показана адекватность предлагаемого математического решения экспериментальным данным натурного строительного объекта.
Обсуждение. Предложенная модель позволяет проводить оценку мощности заряда взрывчатого вещества для изотропных и анизотропных геологических систем. Полученные аналитические представления демонстрируют степень и характер влияния физико-механических свойств грунтов на величину мощности заряда. Численное сравнение как с экспериментальными данными натурного уплотнения грунтов, так и с рекомендациями по уплотнению просадочных грунтов большой мощности гидровзрывным методом показало, что предложенная математическая модель согласуется с эмпирическими данными.
Заключение. Основным результатом исследования является математическая модель мощности заряда взрывчатого вещества при устранении просадочности лёссов глубинными гидровзрывами. Построены аналитические представления мощности заряда с учётом физико-механических свойств грунтов. Получена численная оценка мощности, согласующаяся со значениями эмпирических данных. Практическая значимость исследования состоит в возможности применения математической модели в качестве расчётной методики и внедрения в исследовательские и проектные организации. Дальнейшие исследования будут направлены на построение решений средствами математического моделирования и других обратных задач в рамках инженерно-технологического процесса уплотнения грунтов.
Разработана комбинированная методика генерации вибросигналов подшипников на основе опыта и конечно элементного моделирования. Модельный подход позволяет формировать последовательности импульсов, соответствующие разным стадиям локального дефекта. Полученные комбинированные сигналы корректно воспроизводят рост статистических диагностических параметров. Методика восполняет дефицит экспериментальных данных на ранних стадиях дефекта без повреждения оборудования. Набор сигналов пригоден для тестирования и валидации алгоритмов вибродиагностики.
Введение. Создание достоверных тестовых наборов вибрационных сигналов остаётся актуальной задачей вибродиагностики, поскольку отсутствие данных по ранним стадиям дефектов подшипников затрудняет разработку и верификацию алгоритмов диагностики. Экспериментальное получение таких сигналов ограничено отсутствием соответствующих образцов и длительностью процесса накопления повреждений. Существующие подходы на основе численного моделирования требуют высоких вычислительных ресурсов и сложной настройки, что снижает их практическую применимость. Пробелом в исследованиях является отсутствие простой, воспроизводимой и валидированной методики генерации сигналов, отражающих последовательное развитие дефекта. Целью данного исследования является создание упрощённой методики формирования тестового набора сигналов вибрации подшипника, который может использоваться для разработки и верификации новых методов вибродиагностики. Методика основана на комбинировании экспериментальных и смоделированных сигналов.
Материалы и методы. В исследовании использовались экспериментальные данные, полученные с лабораторной установки, моделирующей роторный узел с подшипником качения (тип 180603). Для имитации ранних стадий дефекта (единичная и двойная ямка выкрашивания) применялось динамическое моделирование методом конечных элементов в среде ANSYS Mechanical (версия 16.2) на основе плоских элементов Plane162 с применением пакета LS-DYNA. Полученные последовательности импульсов накладывались на измеренный сигнал исправного подшипника для формирования комбинированных сигналов. Все сигналы (3 экспериментальных, 2 комбинированных) подвергались анализу с использованием преобразования Фурье, полосовой фильтрации (октавная полоса частот 5,4 кГц) и расчёта статистических параметров: СКЗ, пик-фактора и коэффициента эксцесса. Анализ проводился в среде Mathcad (версия 15.0).
Результаты исследования. В результате исследования разработана методика формирования тестового набора вибрационных сигналов подшипника качения, охватывающая исправное состояние и последовательное развитие локального дефекта наружного кольца. Результаты показали корреляцию между амплитудой вибрационных сигналов и стадиями дефектов — наблюдался рост амплитуд в высокочастотной области, что подтверждает взаимодействие тел качения с дефектными поверхностями. Дополнительный статистический анализ выявил увеличение диагностических параметров (среднего квадратического значения, пик-фактора и коэффициента эксцесса) по мере развития повреждения. Установлено, что смоделированные сигналы воспроизводят характерные признаки дефекта и корректно вписываются в общую тенденцию изменения параметров.
Обсуждение. Полученные данные демонстрируют, что предложенная методика позволяет упрощенно формировать эталонные сигналы без необходимости длительного накопления экспериментальных данных или повреждения оборудования. Физическая обоснованность смоделированных импульсов и согласованность динамики роста диагностических параметров с реальными данными подтверждают возможность использования данной методики для стандартизированного тестирования методов вибродиагностики.
Заключение. Разработанная методика обеспечивает эффективное и воспроизводимое формирование тестовых наборов сигналов для вибродиагностики. Она может быть использована для ускоренной верификации алгоритмов, снижения затрат на эксперименты и повышения надёжности диагностики. В дальнейшем планируется упрощение генерации импульсов на основе аналитического моделирования и расширение методики на другие типы подшипников и дефектов.
Представлен универсальный метод преобразования диаграмм между нотациями УФО и BPMN для повышения наглядности. Разработаны шесть операций преобразования УФО в BPMN и четыре операции обратного преобразования. Показано, что УФО-нотация сокращает число графических значков и упрощает чтение диаграмм.
Описаны элементы УФО на языке исполнения процессов XPDL для последующей автоматизации. Метод позволяет учитывать материальные и информационные потоки и проводить функционально-стоимостный анализ. Результаты применимы при проектировании, автоматизации и оптимизации производственных процессов.
Введение. При моделировании бизнес-процессов широко используется нормативная система (нотация) BPMN. Однако она недостаточно выразительна для представления технических и производственных механизмов. BPMN плохо описывает параллельные потоки с жесткими ресурсными ограничениями, слабо поддерживает моделирование физических параметров и технологических условий. Эти и другие недочеты ухудшают анализ производительности и надежности, снижают применимость моделей для оптимизации и верификации. Цель представленной работы — создать метод, который задействует альтернативную нотацию и таким образом ограничит влияние перечисленных недостатков BPMN при моделировании производственных процессов.
Материалы и методы. Базой нового решения было сопоставление BPMN и нотации для системы «узел – функция – объект» (УФО). Элементы диаграмм — это перекрестки некоторых связей (узлы). В них расположены функциональные элементы (функции, процессы), имеющие в некоторых случаях и характеристики субстанции (объекты). Сравнительный анализ нормативных систем BPMN и УФО показал возможность взаимного преобразования диаграмм. Процессы визуализировали с помощью CASE-инструмента (от англ. computer aided software engineering) NFO-toolkit (от англ. набор инструментов УФО) и программы Stormbpmn по правилам BPMN. УФО-диаграмму описали на языке XPDL1.
Результаты исследования. Разработаны шесть последовательных операций для преобразования УФО-диаграммы в BPMN и четыре — для обратной трансформации. В контексте и декомпозиции показана схема выпуска комплектующих — от требования на разработку технологического процесса до выдачи изделий. Представлены декомпозиции УФО-элементов «Термопластавтомат», «Мастер» и «Отдел разработки», каждому из которых соответствует декомпозиция одноименной дорожки пула BPMN-нотации. Доказано, что преобразование диаграммы BPMN в УФО улучшает описание процесса в целом и с любой степенью подробности. УФО-подход не обращается к графической системе обозначений BPMN, из-за которой возрастают трудозатраты и риски ошибок моделирования. На языке XPDL описаны процессы, соединители, разветвители, связи, внешняя сущность и другие элементы УФО-диаграмм.
Обсуждение. Основные преимущества УФО-нотации перед BPMN-подходом: более легкая процедура создания моделей и лучшая их наглядность. Простой графический набор УФО сокращает время моделирования и повышает его точность. УФО-подход ориентирован на учет информационных и материальных связей. Значит, можно проводить функционально-стоимостной CASE-анализ, что невыполнимо методом BPMN. Язык XPDL подходит для описания элементов УФО-диаграмм, причем решение можно русифицировать.
Заключение. Содержательная избыточность и другие недостатки нотации BPMN исключаются при использовании более универсальной и удобной нотации — УФО. Итоги исследования будут способствовать развитию теории и практики графоаналитического моделирования производственных процессов, позволят упростить процедуру их разработки и автоматизации.









































