


МЕХАНИКА
Разработан новый подход расчета балок с переменной жесткостью по длине. Получены точные и приближенные матрицы жесткости балочного конечного элемента. Показано повышение точности расчета и снижение требуемой дискретизации схемы. Даны критерии выбора между точной и приближенной матрицей жесткости элемента. Результаты пригодны для внедрения в программные комплексы расчета строительных конструкций. Метод может применяться к анализу железобетонных балок, устойчивости и динамики балок.
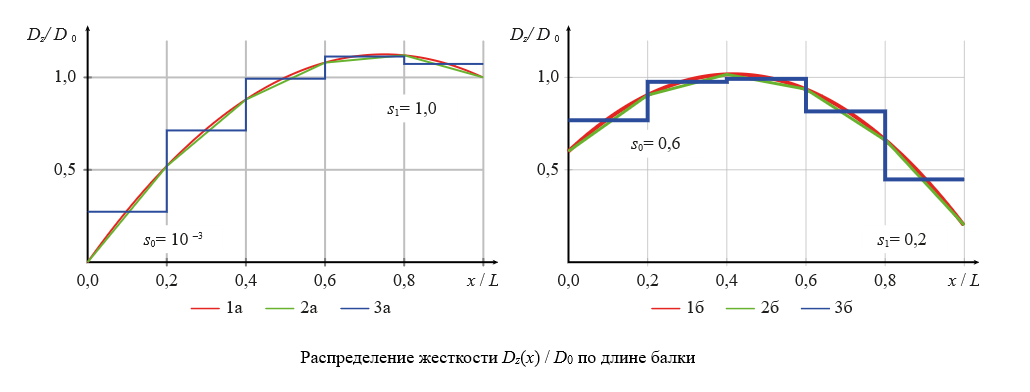
Введение. Современные тенденции в строительстве, связанные с оптимизацией массы и материалов, требуют точных методов расчёта напряжённо-деформированного состояния, в частности для балок переменной жёсткости. Аналитический расчёт напряжённо-деформированного состояния таких балок сопряжён со значительными трудностями, что ограничивает его практическое применение. Для решения подобных задач широко используются численные методы, в частности метод конечных элементов (МКЭ), при этом закон изменения жёсткости обычно аппроксимируется ступенчатой (дискретной) функцией. Цель настоящей работы — разработать подход на основе кусочно-линейной аппроксимации жёсткости. Линейная аппроксимация жёсткости обеспечивает оптимальное соотношение точности, сложности и вычислительных ресурсов. Предлагаемый подход обеспечивает существенно более высокую точность по сравнению с традиционной дискретной аппроксимацией при сопоставимой вычислительной сложности — это позволяет адекватно моделировать как плавные градиенты жёсткости, так и резкие её изменения.
Материалы и методы. В первом приближении матрица жесткости одномерного балочного конечного элемента с линейно изменяющейся изгибной жесткостью получена на основе вариационной формулировки задачи. Точная матрица жесткости — методом непосредственного интегрирования дифференциального уравнения изгиба балки. Точные решения в примерах расчета получены с применением программного комплекса Maple. Численное решение, с использованием метода конечных элементов, реализовано в разработанной автором программе на языке программирования Python.
Результаты исследования. В ходе исследования были получены приближенная и точная матрицы жесткости балочного конечного элемента, а также вектор узловых реакций (нагрузок) от распределенных нагрузок. Эффективность предложенного подхода продемонстрирована на примерах численного расчета. При этом результаты, полученные методом конечных элементов, верифицированы посредством аналитических вычислений. По итогам проведённых расчётов были выработаны рекомендации и критерии для использования точной или приближенной матрицы жесткости.
Обсуждение. Конечные элементы, учитывающие линейное изменение жесткости по длине, позволяют повысить точность получаемых результатов и снизить степень дискретизации расчетной схемы более чем в два раза. Приближенная матрица демонстрирует хорошую сходимость при плавном изменении жесткости по длине. В подобных случаях также допустимо применять дискретную аппроксимацию. Точная матрица позволяет с малой погрешностью рассчитывать ситуации, в которых жесткость в пределах балки изменяется на несколько порядков. Классическая дискретная аппроксимация в таких случаях не обеспечивает высокой точности результатов расчета.
Заключение. В данной работе были получены матрицы жесткости конечных элементов с учетом линейного изменения жесткости по длине. Их вывод осуществлен двумя методами: на основе вариационной постановки задачи и путём непосредственного интегрирования дифференциального уравнения изгиба. Полученные матрицы позволяют выполнять более точный анализ напряжённо-деформированного состояния балок переменной жесткости. Они обладают аналитическим видом, что упрощает их внедрение в существующие программные комплексы. Дальнейшие исследования будут направлены на применение этих матриц к расчёту железобетонных балок с учетом физической нелинейности, а также на решение задач устойчивости и динамики балок переменной жесткости.

Разработан новый подход к расчету давления прессования конгломерата. Модель учитывает изменение плотности и свойств материала при упругом сжатии. Метод использует поэтапное нагружение и решение серии упругих задач деформирования. Показано, что зависимость давления от деформации сжатия имеет нелинейный характер. Установлено, что учет изменения плотности снижает погрешность оценки давления. Результаты могут применяться при проектировании процессов брикетирования древесных отходов.
Введение. Процессы брикетирования и прессования древесных и других порошкообразных материалов становятся ключевыми в круговой экономике и утилизации отходов деревообработки. Точный расчет давления прессования необходим для выбора оборудования и оптимизации режимов, что делает задачу моделирования деформирования конгломератов практически и экономически значимой. В литературе рассматриваются механика порошковых сред, пористых материалов и моделирование упругопластических деформаций гранулярных конгломератов; однако большинство моделей предполагает фиксированные механические характеристики или аппроксимации, не учитывающие зависимость прочности и упругих свойств от изменяющейся плотности при сжатии. Это оставляет пробел в теоретических и прикладных подходах к адекватному расчету давления для материалов с переменной плотностью. Поэтому целью данной работы является разработка подхода для расчета давления прессования конгломерата частиц как функцию степени упругого сжатия с учетом изменения механических характеристик среды.
Материалы и методы. При математическом описании исследуемой задачи использовались положения теории упругости. На основании принципа суперпозиции процесс деформирования среды разбивался на несколько этапов, в каждом из которых среда получала малое приращение по высоте, а механические характеристики оставались постоянными. Предложенный метод определения давления прессования опирался на решение серии обратных упругих задач, в которых задавалось перемещение верхней границы конгломерата прямоугольных частиц и искалось нормальное напряжение, вызвавшее это приращение. Для учёта изменения плотности среды в процессе деформирования применялся метод последовательных нагружений — в пределах каждого из них плотность принималась постоянной и определялась в зависимости от величины суммарной деформации сжатия. В качестве меры деформации использовалась деформация Генки, обладающая свойством аддитивности.
Результаты исследования. В рамках исследования построена итерационная модель расчёта давления прессования конгломерата частиц при изменении механических характеристик в зависимости от степени упругого сжатия. Проведены серии тестовых расчётов на примере конгломерата древесных частиц, у которых модуль Юнга описывается степенной функцией плотности. На каждом этапе деформирования упругие константы материала принимались постоянными в зависимости от плотности среды. С использованием уравнения равновесия и принципа суперпозиции по результатам решения задач упругого деформирования было вычислено давление прессования на каждом этапе нагружения, а также построена зависимость давления прессования от величины деформации сжатия и степени уплотнения.
Обсуждение. Полученные результаты деформирования среды с учётом изменения механических характеристик в зависимости от степени сжатия показали явно выраженную нелинейность кривой зависимости давления прессования от деформации сжатия — при возрастании давления увеличиваются как степень уплотнения среды, так и деформация сжатия. Сравнительный анализ расчётов на примере конгломерата древесных частиц при условии постоянной плотности среды и с учётом изменения плотности в процессе деформирования выявил значительную погрешность оценки давления прессования при усреднении плотности либо при использовании постоянных значений плотности, соответствующих начальному (недеформированному) или конечному состоянию.
Заключение. Построенная итерационная модель позволяет рассчитать давление прессования конгломерата частиц с учётом изменения механических характеристик при упругом сжатии. Предложенный подход учитывает нелинейность зависимости давления прессования от степени уплотнения среды и может быть применён в процессах брикетирования отходов деревообработки.
Получены фактические значения времени вакуумирования емкости. Впервые измерено время создания максимальной глубины вакуума для эжекторов. Показано, что реальные значения времени выше каталожных на одну треть. Предложен метод выбора питающего давления для достижения максимального вакуума. Результаты позволяют точнее подбирать эжекторы для конкретных технологических задач. Данные могут использоваться при проектировании и модернизации вакуумных систем.
Введение. В промышленности широко распространен процесс получения технологического вакуума с помощью эжекторов, использующих кинетическую энергию струи сжатого воздуха. Выбор необходимой модели эжектора, а при создании поля эжекторов также и их количества, осуществляется исходя из соответствия характеристик эжектора основным параметрам проектируемого технологического процесса. Одной из важных характеристик эжектора, существенно влияющих на повышение производительности всей вакуумной системы в целом, является время вакуумирования мерной (тарированной) емкости. При этом в технической литературе данный параметр приводится не при максимальной глубине вакуума, производимого эжектором, и не при соответствующей этому значению величине питающего давления, а при некоторых, не вполне определенных параметрах, называемых изготовителями эжекторов оптимальными. В таких случаях невозможно точно оценить фактическое значение важного критерия. В связи с этим цель данной работы — путем экспериментальных исследований установить фактическое значение времени вакуумирования мерной (тарированной) емкости для различных типов эжекторов.
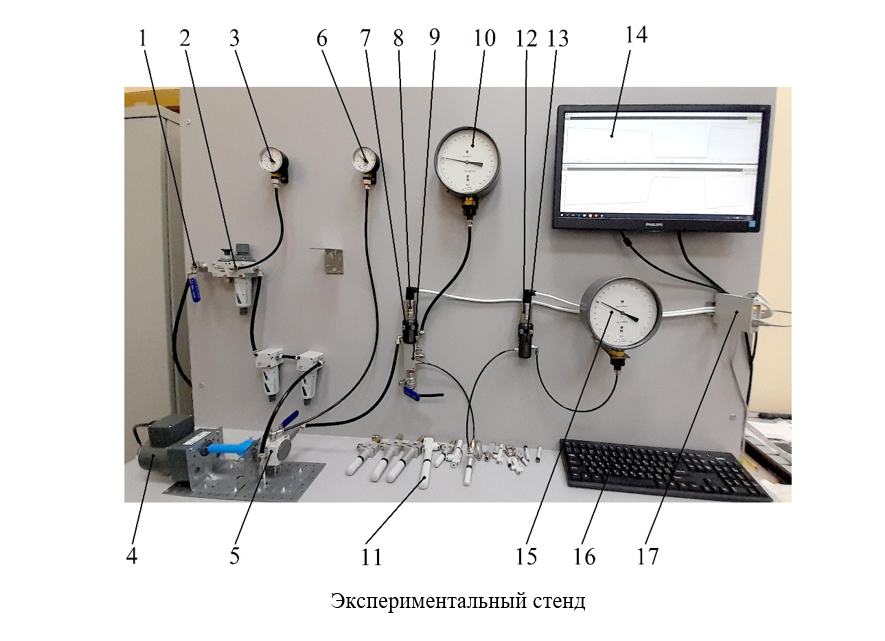
Материалы и методы. Экспериментальные исследования проводились на специально спроектированном и изготовленном авторами стенде, позволяющем изучать различные параметры вакуумных эжекторов. В частности, стенд дает возможность установить точное время вакуумирования мерной емкости эжекторами, имеющими диаметр сопла от 0,1 до 4,0 мм при величине питающего давления, обеспечивающего максимальную глубину вакуума для каждой исследуемой модели. Исследования проводились с использованием наиболее популярных вакуумных эжекторов семейств VEB, VEBL, VED и VEDL производства Camozzi при заранее определенной, точно заданной величине входного питающего давления для каждого типоразмера эжектора. Фактические значения времени вакуумирования при наибольшей глубине вакуума для каждого эжектора определялись экспериментально.
Результаты исследования. Установлено, что производительность эжекторов серий VEB, VEBL, VEDL и VED отличается от данных, приведенных в каталоге фирмы-изготовителя. Необходимое время для достижения максимальной глубины вакуума каждого из эжекторов превышает на 25–40 % приведенные производителем данные, и эта «погрешность» сказывается в итоге на производительности вакуумной системы.
Обсуждение. Экспериментальные данные показали, что отличие действительных значений времени вакуумирования мерной емкости от значений, приведенных в каталогах фирмы-изготовителя эжекторов, объясняется тем, что при проведении соответствующих испытаний изготовитель ориентируется не на максимальную глубину вакуума, создаваемую эжектором, а на глубину вакуума, создаваемую неким «оптимальным» (формулировка изготовителя) значением питающего давления. Практически во всех рассмотренных авторами статьи случаях это «оптимальное» питающее давление производило вакуум, глубина которого отличалась от максимальной. В этой связи представляется целесообразным вводить корректировку величины входного питающего давления для достижения максимальной глубины вакуума для каждого типа эжектора.
Заключение. Полученные значения времени создания вакуума в одном литре объема при максимальной глубине вакуума, производимого эжектором, позволяют осуществлять более точный выбор вакуумных эжекторов в зависимости от решаемых технологических задач, обеспечить наибольшую эффективность и экономичность автоматизированных вакуумных систем. Результаты исследований могут быть использованы всеми фирмами-изготовителями эжекторов для корректировки их базовых каталогов и соответствующих рекомендаций по применению этих изделий. Дальнейшие исследования в этой области будут направлены на изучение точности геометрических форм поверхности канала эжектора, чистоты обработки и технологии их производства, влияющие на прохождение воздушного потока.
Разработан метод раннего контроля неоднородной плотности резонатора. Метод связывает оптические свойства кварцевого стекла с распределением плотности. Используется восстановление плотности по измерениям светового потока через заготовку. Получено распределение плотности с отклонением не более пяти процентов. Метод чувствителен к объёмным дефектам, таким как поры и пузырьки. Результаты применимы для оптимизации производства высокоточных систем ориентации.
Введение. Создание высокоточных систем ориентации нового поколения с улучшенными техническими характеристиками остаётся ключевой задачей точного приборостроения — это необходимо для надёжной работы подвижных объектов длительного срока эксплуатации. Одним из перспективных путей является применение датчиков, основанных на эффекте Брайана (волновой твердотельный гироскоп, ВТГ), которые показывают существенные преимущества по стабильности характеристик в условиях внешних факторов. За последние 10 лет зарубежные и отечественные исследования достигли заметных успехов в повышении целевых параметров ВТГ, однако определенные проблемы совершенствования остаются открытыми. Так, в литературе уделяется внимание снижению погрешностей измерения ВГТ за счёт компенсации влияния несовершенств резонатора, но чаще эти методы применимы на стадиях после формообразования. Недостаточно разработаны методы ранней идентификации неоднородностей материала (разноплотности) на этапе контроля заготовок, что создаёт пробел в технологической цепочке и снижает эффективность последующей балансировки и калибровки. Цель работы — разработать метод идентификации разноплотности резонатора на ранней технологической стадии — на этапе контроля заготовки.
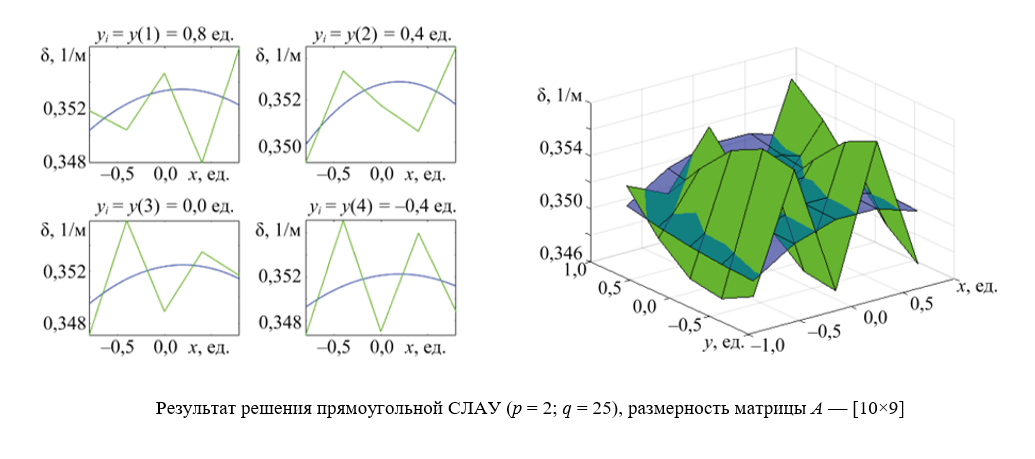
Материалы и методы. Рассматривается оптически прозрачный материал — кварцевое стекло, являющееся наиболее распространённым материалом для изготовления резонаторов ВТГ, в частности марка КУ-1. Метод идентификации основан на связи оптических свойств кварцевого стекла (коэффициента поглощения) с искомым объёмным распределением плотности заготовки. Проведён виртуальный эксперимент, включающий формирование и решение системы линейных алгебраических уравнений (СЛАУ) по результатам серии измерений интенсивности светового пучка, прошедшего через заготовку. Для описания распределения плотности использована полиномиальная аппроксимация, что повышает робастность метода. Решение СЛАУ получено через поиск псевдорешения методом наименьших квадратов на базе сингулярного разложения.
Результаты исследования. Разработан метод идентификации разноплотности кварцевого стекла на этапе контроля качества технологической заготовки резонатора ВТГ. Получено искомое распределение плотности кварцевого стекла по объёму заготовки, совпадающее с «истинным» — отклонение не превышает 5 %. Оценена чувствительность метода к наличию макродефектов в объёме заготовки — пор, пузырьков и пр.
Обсуждение. Результаты показывают, что применение предложенного метода позволяет эффективно контролировать разноплотность заготовок и оптимизировать технологию производства резонаторов, обеспечивая повышение результативности процессов минимизации влияния несовершенств на их характеристики. Виртуальные эксперименты продемонстрировали, что измерение интенсивности светового луча, прошедшего через заготовку, позволяет восстановить распределение коэффициента поглощения и плотности с точностью не менее 0,005 %. Созданная система линейных алгебраических уравнений обеспечила возможность определения этих параметров по объему. Подчеркнуты некоторые особенности, касающиеся решения неопределенных систем линейных алгебраических уравнений (СЛАУ). Пристальное внимание уделено необходимости контроля соотношения между количеством корней и неизвестных для получения устойчивого решения.
Заключение. Предложенный метод идентификации разноплотности кварцевого стекла на этапе контроля качества заготовки при производстве резонаторов ВТГ показывает высокую эффективность и точность. Метод позволяет адекватно описывать функцию распределения и гибко настраивать оптимальную размерность СЛАУ, напрямую связанную с объёмом проводимых экспериментов. Полученные результаты подтверждают применимость оптических характеристик материала для контроля объёмного распределения плотности, что даёт возможность улучшить контроль заготовок и оптимизировать производственные процессы. Требуемая точность измерений, обусловленная уровнем разноплотности, влияющим на характеристики ВТГ, практически достижима, что свидетельствует о реальной возможности внедрения метода в производстве. Данный подход может быть использован в последующих исследованиях и разработках высокоточных систем, способствуя прогрессу в точном приборостроении и повышению качества выпускаемой продукции.
Предложена модель рассеяния энергии в многослойной дорожной одежде. Показано, что укрепление верхней части земляного полотна снижает потери энергии. Установлено решающее влияние жесткости подстилающего слоя на величину диссипации. Численное моделирование согласовано с полевыми измерениями импульсным нагружением. Доказано, что укрепленные основания уменьшают диссипацию энергии более чем в два раза. Результаты могут применяться при проектировании долговечных и экономичных дорог.
Введение. Конструирование дорожных одежд автомобильных дорог — ключевой этап проектирования, напрямую влияющий на их долговечность и эксплуатационные расходы. В последние годы в условиях роста интенсивности и динамической нагрузки транспорта получили распространение такие технологии укрепления земляного полотна и оснований, как геосинтетические армирования и стабилизированные слои, что делает изучение их эффективности особенно актуальным. В литературе отмечаются практические преимущества укреплённых слоёв — повышение несущей способности и снижение деформаций. Однако недостаточно разработаны модели диссипации энергии при динамических воздействиях в конструкциях с такими слоями. Теоретические подходы к анализу рассеяния энергии, включая линейно-упругие и вязкоупругие модели и методы конечных элементов, в основном применялись к традиционным конструкциям, их адаптация для армированных и стабилизированных слоёв требует доработки, поскольку остаются пробелы в количественном сравнении эффективности по местоположению и жёсткости укреплений. Цель представленной работы — анализ диссипации энергии деформирования в структуре дорожных одежд с различными вариантами расположения укрепленных слоев и определение оптимальных конструктивных решений, способствующих повышению долговечности дорожных покрытий. Для ее достижения необходимо было формализовать модель диссипации энергии для конструкций с укреплениями, провести сравнительный анализ вариантов расположения и жёсткости слоёв.
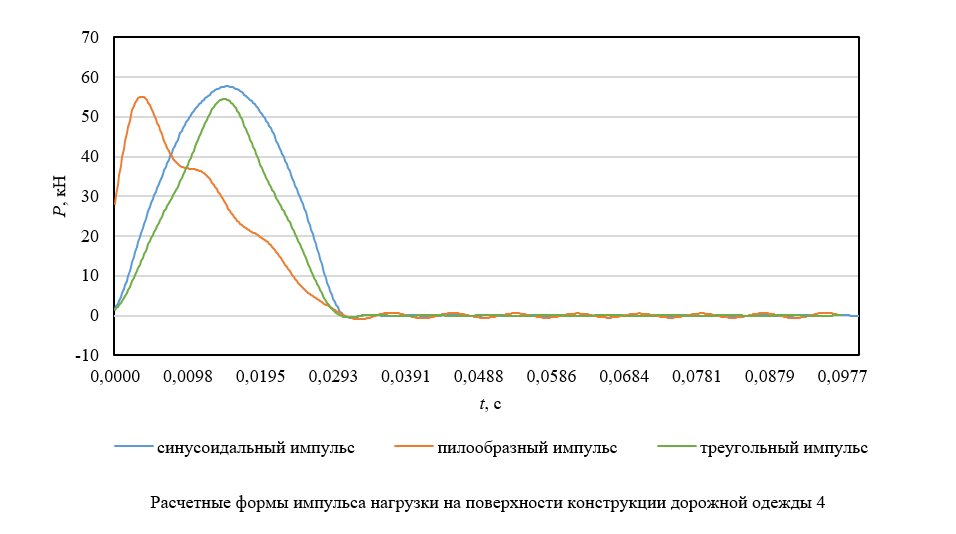
Материалы и методы. В рамках исследования применен комплексный подход к анализу процессов деформирования слоистых сред на примере дорожных одежд, предполагающий применение как расчетного аппарата, так и современного экспериментального оборудования. В качестве расчетного аппарата использовалась математическая модель слоистого полупространства в осесимметричной постановке в цилиндрической системе координат, базирующаяся на решении системы динамических уравнений Ламе и позволяющая строить амплитудно-временные характеристики вертикальных перемещений и импульса ударного нагружения, на основе которых возможно построение динамических петель гистерезиса. В качестве экспериментального оборудования применена установка ударного нагружения FWD PRIMAX 1500, позволяющая регистрировать аналогичные характеристики отклика дорожной одежды в натурных условиях при нагружении, эквивалентном расчетному.
Результаты исследования. В ходе исследования выполнено численное моделирование конструкций дорожных одежд, традиционно используемых в Российской Федерации, и так называемых полноглубинных дорожных одежд, состоящих практически полностью из материалов, укрепленных вяжущими. Построены динамические петли гистерезиса и дано сравнительное описание полученных результатов. В ходе численного эксперимента установлено, что укрепление только слоя земляного полотна даже без устройства укрепленного слоя основания под асфальтобетоном позволяет снизить величину рассеиваемой энергии деформирования. Также сделан вывод о том, что в наибольшей степени влияние на величину рассеиваемой энергии оказывает именно модуль упругости подстилающего полупространства, моделирующего земляное полотно.
Обсуждение. Наибольший эффект, как технический, так и экономический, может быть достигнут путем укрепления верха земляного полотна с сохранением несвязных слоев в основании дорожной конструкции. Это решение позволит приблизить функционирование дорожной одежды к упругой стадии и вместе с тем снизить риски появления трещин на поверхности покрытия из-за излишне жесткого слоя укрепленного основания.
Заключение. На основании построенных динамических петель гистерезиса показано, что снижение величины энергии деформирования может быть достигнуто как устройством укрепленных слоев дорожной одежды по всей ее глубине, так и локальным укреплением слоя подстилающего полупространства и дополнительного слоя основания из песка. В ходе численного эксперимента доказано, что устройство укрепленных слоев оснований более чем в 2–3 раза снижает величину диссипации энергии деформирования в структуре дорожной одежды. Продемонстрировано качественное совпадение результатов экспериментальных исследований и результатов численного моделирования.
ИНФОРМАТИКА, ВЫЧИСЛИТЕЛЬНАЯ ТЕХНИКА И УПРАВЛЕНИЕ
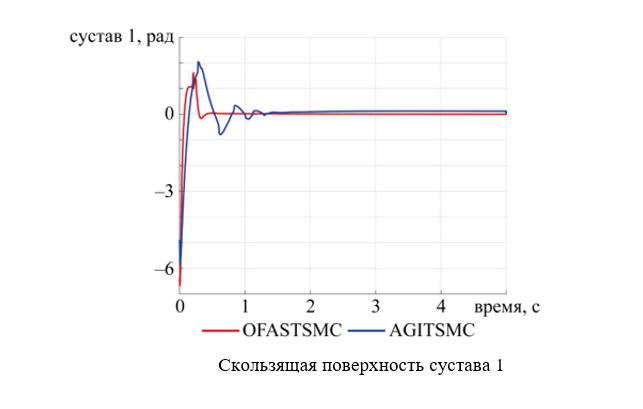
Предложен новый метод управления манипулятором с конечным временем сходимости. Метод оценивает неизвестные возмущения и отказы приводов в режиме реального времени. Адаптивная настройка усилений снижает завышение управляющих воздействий. Сглаженное супер скручивание уменьшает дрожание и сохраняет робастность системы. Численные испытания показывают рост точности и плавности траекторного слежения. Метод пригоден для промышленной, медицинской и сервисной робототехники.
Введение. Роботизированные манипуляторы эксплуатируются в условиях изменчивой среды с неопределённостями, внешними возмущениями и возможными отказами приводов, что существенно осложняет проектирование надёжных систем управления. Важность разработки робастных и практично реализуемых алгоритмов управления возрастает с ростом применения манипуляторов в опасных, точных и сверхбыстрых операциях (промышленная автоматизация, медицина, космические и сервисные роботы). Традиционные ПИД-регуляторы и методы вычисления момента просты, но недостаточно устойчивы к немоделированным воздействиям. Управление скользящим режимом, в частности алгоритм супер-скручивания (STA), обеспечивает повышенную робастность и конечную сходимость, однако страдает эффектом дрожания и часто требует априорной информации о границах возмущений. Современные модификации (например, AGITSMC) достигают конечного времени сходимости и снижают дрожание, но могут вызывать завышение управляющих усилий и сохраняющиеся огрехи при оценке возмущений и отказов. В литературе заметен пробел: отсутствует интегрированный подход, который одновременно обеспечивает конечновременную сходимость, адаптивную компенсацию неизвестных возмущений и отказов, подавление дрожания и практическую реализуемость. Поэтому целью данной работы стало разработать и проанализировать новую структуру управления OFASTSMC (Observer-Based Finite-Time Adaptive Reinforced Super-Twisting Sliding Mode Control), объединяющую конечновременный наблюдатель, адаптивную настройку усилений и сглаженное супер-скручивающее управление. Решаемые задачи: построение конечновременного наблюдателя для оценки возмущений и отказов в режиме онлайн; разработка адаптивного механизма настройки усилений для предотвращения завышения управляющих сигналов; внедрение сглаженной STA для минимизации дрожания; проведение анализа устойчивости; выполнение численных и экспериментальных проверок на роботизированных манипуляторах.
Материалы и методы. Рассматривается стандартная динамическая модель роботизированного манипулятора с n степенями свободы, построенная на основе лагранжевой механики. Модель учитывает нелинейные связи, вязкое трение, внешние возмущения и аддитивные отказы приводов. Для обеспечения робастного управления с конечным временем сходимости была разработана усиленная скользящая поверхность, использующая нелинейные ошибки с адаптивными степенями — это ускоряет процесс сходимости. В схему управления включён конечновременной расширенный наблюдатель состояния (ESO), позволяющий в реальном времени оценивать суммарные возмущения и моменты отказов приводов. На основе этих оценок закон управления реализован в виде суперскручивающего алгоритма скользящего режима с адаптивной настройкой коэффициентов и использованием граничного слоя для снижения дрожания при сохранении высокой робастности. Устойчивость замкнутой системы строго проанализирована с использованием аппарата теории Ляпунова — это позволило доказать достижение конечного времени сходимости ошибок слежения под действием предложенного регулятора. Предложенный алгоритм OFASTSMC реализован в среде MATLAB/Simulink и проверен на примере плоского роботизированного манипулятора с двумя степенями свободы. Манипулятор подвергался действию переменных возмущений и сценариев деградации привода. Для объективного сравнения эффективности метод сопоставлялся с AGITSMC при идентичных начальных условиях, параметрах модели и опорных траекториях.
Результаты. Численные эксперименты демонстрируют, что предложенный метод OFASTSMC значительно превосходит AGITSMC по точности слежения, устойчивости и плавности управления. В частности, максимальные ошибки по положению звеньев снижены более чем на 40 %, а время установления траектории уменьшено примерно на 25 %. Метод эффективно устраняет дрожание в управляющем сигнале за счёт функций насыщения и ограничений усиления, обеспечивая более плавное управление приводами. Адаптивный наблюдатель точно оценивает суммарные возмущения и входы отказов в реальном времени, обеспечивая компенсацию без предварительной информации. Эффективность метода подтверждена в различных сценариях: резкие отказы приводов, нелинейные нагрузки, переменные скорости траектории. Сходимость на скользящей поверхности достигается за конечное время, что подтверждает теоретические гарантии.
Обсуждение. OFASTSMC обеспечивает высокоточную и робастную траекторию слежения в условиях неопределённостей. Основное преимущество метода — интеграция адаптивной настройки степеней, наблюдательной обратной связи и ограниченного супер-скручивающего управления в единую структуру. В отличие от подходов с фиксированными усилениями или без наблюдательной обратной связи, предложенная схема адаптируется в реальном времени, что позволяет поддерживать сходимость и существенно снижать дрожание управления. Метод сочетает адаптивность, наблюдательную коррекцию и ограниченное супер-скручивание, обеспечивая устойчивую сходимость и минимизацию дрожания.
Заключение. Полученные результаты подтверждают, что OFASTSMC является эффективным и робастным решением для задачи траекторного слежения в присутствии неопределённостей. Метод демонстрирует вычислительную эффективность и простоту реализации, что делает его пригодным для практического применения. Для дальнейшего развития исследования планируется переход к реализации управления в пространстве задач и проведение экспериментов на физическом оборудовании с учётом шумов и модельных несоответствий.

При краткосрочном прогнозировании транспортного потока на скоростной автомагистрали, выбирая между нейросетевой и классической машинной моделью, предпочтение следует отдавать нейросетевой архитектуре — в частности, LSTM. Показано, что модель с долгой краткосрочной памятью дает более точные прогнозы. Ее архитектура лучше отражает временную структуру и сложную динамику трафика. Метод опорных векторов дает более высокие ошибки при резких изменениях потока. Результаты можно применять для снижения заторов и выбросов на автомагистралях. Подход полезен для развития интеллектуальных транспортных систем в городах.
Введение. При растущей загруженности автомагистралей эффективность интеллектуальных транспортных систем зависит от качественного краткосрочного прогнозирования потоков. Статистические методы недостаточно точно учитывают нелинейные и динамические изменения трафика. Более перспективны модель долгой краткосрочной памяти (LSTM) и метод опорных векторов (SVR). Однако они не ранжированы в плане корректности, так как нет работ по комплексному сопоставлению их адекватности для краткосрочного прогнозирования потоков. Представленное исследование восполняет этот пробел. Цель работы — сравнительный анализ точности LSTM и SVR и выбор оптимального подхода для прогнозирования транспортного потока на автомагистрали Мэйгуан Шэньчжэня.
Материалы и методы. Данные детекторов транспорта собраны в июне 2021 года на автомагистрали Мэйгуан. Использовались методы предварительной обработки данных, включая заполнение взвешенным средним и нормализацию. Для извлечения признаков применили автокорреляционный анализ, а также создание переменной взаимодействия скорости и занятости детектора. Модели обучались и тестировались на данных, полученных с детекторов с 5-минутными интервалами.
Результаты исследования. Показатели LSTM лучше на 17,86 % по среднеквадратической, на 19,82 % — по средней абсолютной и на 25,78 % — по средней абсолютной процентной ошибке. В периодах с наименьшей ошибкой прогнозирования интенсивности потока RMSE, MAE и MAPE для модели LSTM оказались меньше на 36,5 %, 34,3 % и 42,3 % соответственно. В периодах c наибольшей ошибкой RMSE, MAE и MAPE для LSTM оказались меньше на 73,2 %, 65,4 % и 64,4 % соответственно. Критерий Уилкоксона <0,05 подтвердил статистическую значимость различий.
Обсуждение. Лучшие прогнозные возможности LSTM обусловлены ее архитектурой, а именно комбинированием переменных взаимодействия и лаговых показателей. LSTM лучше учитывает временные зависимости потока, адаптируется к его сложным, долгосрочным динамическим изменениям и остается точной даже при значительных колебаниях. Меньшая прогнозная эффективность SVR обусловлена слабой, нелинейной аппроксимирующей способностью. При резких изменениях потока существенно увеличиваются показатели ошибок.
Заключение. При краткосрочном прогнозировании транспортного потока на скоростной автомагистрали, выбирая между нейросетевой и машинной моделью, следует предпочесть нейросетевую — например, LSTM. Результаты исследования целесообразно использовать в предиктивных стратегиях снижения заторов. Краткосрочное прогнозирование на основе LSTM может быть базой для оптимизации управления дорожным движением, снижения заторов и загрязняющих выбросов, а также для оптимизации интеллектуальных транспортных систем. Перспективное направление — разработка гибридных архитектур, интегрирующих контекстные данные (погода, инфраструктура, аварии) для улучшения прогнозов в режиме реального времени.
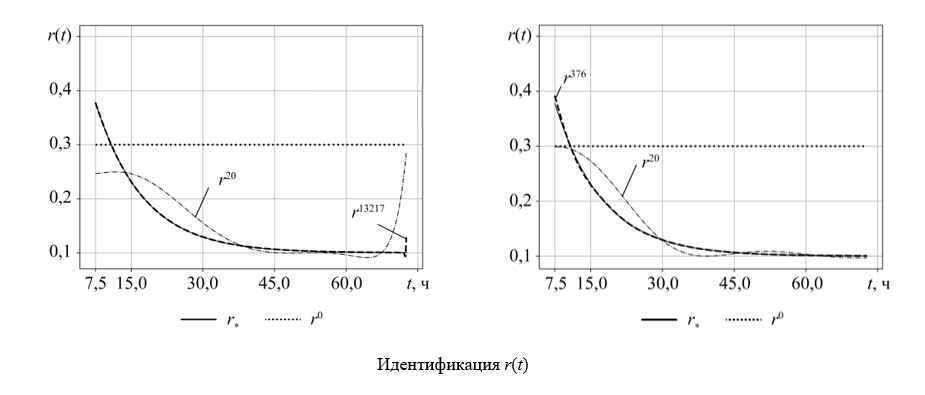
Предложен алгоритм прямой идентификации функции активности. Алгоритм основан на экстремальном подходе с регулируемым направлением спуска. Получено аналитическое выражение градиента через решение сопряженной задачи. Показано ускорение сходимости метода в десятки раз по сравнению с градиентным. Пределы идентифицируемости связаны с инерционностью и временем реакции сети. Метод применим для моделирования потоков информации в социальных сетях.
Введение. Повышение точности математических моделей распространения информации в социальных сетях напрямую связано с возможностью корректной идентификации их параметров. Во многих работах фундаментальную сложность этой задачи фактически обходят, подменяя прямую идентификацию искомых функций подбором параметров их эвристических аппроксимаций, что неизбежно приводит к снижению как точности, так и универсальности модели. В линейной диффузионной модели, описывающей пространственно-временную динамику распространения информации, одним из ключевых параметров выступает функция, характеризующая активность пользователей. Целью данного исследования является разработка и численная реализация алгоритма прямой параметрической идентификации функции активности пользователей на основе прямого экстремального подхода, позволяющего полностью отказаться от эвристических аппроксимаций, а также оценка его вычислительной эффективности в сопоставлении с классическим градиентным методом.
Материалы и методы. Для решения задачи параметрической идентификации был использован прямой экстремальный подход. В отличие от классического метода наискорейшего спуска, предложенный метод с регулируемым направлением спуска адаптирует траекторию поиска к локальным особенностям функционала качества за счет введения параметра регулирования. Численное решение прямой и сопряженной задач осуществлено по неявной конечно-разностной схеме. Верификация метода проводилась на синтетических данных.
Результаты исследования. Для алгоритма идентификации получено аналитическое выражение градиента целевого функционала через решение сопряженной задачи. Установлены границы идентифицируемости искомого параметра, обусловленные инерционностью диффузионного процесса и временем установления реакции сети. Проведено сравнительное исследование градиентных алгоритмов. Классический метод наискорейшего спуска продемонстрировал медленную и неравномерную сходимость, потребовав для достижения критерия остановки 13 217 итераций, тогда как метод с регулируемым направлением спуска обеспечил сходимость к тому же уровню точности за 376 итераций.
Обсуждение. Полученные результаты подтверждают теоретические предпосылки о необходимости учета пространственной неоднородности градиента функционала при решении бесконечномерных задач оптимизации. Классический градиентный метод демонстрирует низкую эффективность при восстановлении нестационарных параметров вследствие неоднородности градиента, в то время как метод с регулируемым направлением спуска позволяет достичь равномерной и быстрой сходимости. Это свидетельствует о том, что адаптация алгоритма к специфике бесконечномерной задачи является ключевым фактором успеха. Основной вклад исследования заключается в развитии вычислительного аппарата для прямого определения функциональных параметров, что расширяет методологический арсенал анализа систем, описываемых уравнениями в частных производных.
Заключение. Основными результатами работы являются разработка и верификация эффективного алгоритма прямой идентификации функции активности пользователей в линейной диффузионной модели социальной сети. Практическая значимость состоит в создании более точных и интерпретируемых инструментов для моделирования информационных потоков без привлечения априорных аппроксимаций. Разработанный алгоритм продемонстрировал значительное преимущество по скорости и характеру сходимости. Тем не менее, интерпретация физического смысла идентифицируемой функции в рамках данной модели требует дальнейшего развития. Перспективным направлением является применение метода к более совершенным моделям, учитывающим пространственную неоднородность активности пользователей, а также его расширение на идентификацию вектора функций.
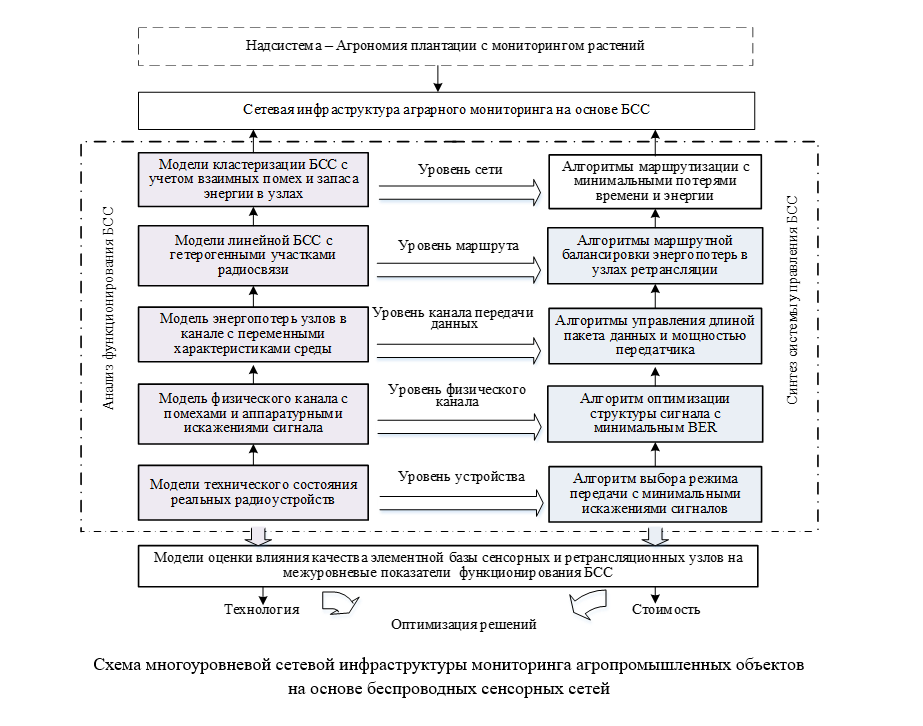
Автор предлагает многоуровневый подход к повышению надежности сенсорных сетей. Модель объединяет параметры сети, свойства аппаратуры и влияние внешней среды. Показано повышение стойкости сети, уменьшение задержек и снижение расхода энергии. Выведены связи между показателями эффективности, дестабилизирующими и управляющими факторами. Подход применим для мониторинга аграрных объектов и систем точного земледелия. Результаты могут использоваться при проектировании устойчивых цифровых агросистем.
Введение. В условиях цифровизации агросектора точное земледелие становится ключевым драйвером устойчивости: беспроводные сенсорные сети (БСС) обеспечивают непрерывный мониторинг почвенно-климатических параметров и состояния растений, поддерживая прогнозирование урожайности и ресурсную оптимизацию при снижении операционных рисков. Несмотря на значительный прогресс в исследованиях энергоэффективности, маршрутизации и топологий БСС, проблема их системной надежности в реальных агросценариях освещена фрагментарно. Существующие теоретические подходы опираются на теорию графов, марковские и квазидетерминированные модели для оценки связности и отказоустойчивости, но недостаточно учитывают деградацию батарей, вариативность радиоканала и внешние факторы (микроклимат, помехи), а также их совместное влияние. Цель данной статьи — разработать методический подход к повышению надежности БСС для мониторинга агрообъектов посредством многоуровневой модели, интегрирующей сетевые параметры, свойства аппаратуры и внешние воздействия.
Материалы и методы. Для разработки модели были применены методы системного анализа, в т.ч. анализа и синтеза ранее известных моделей и алгоритмов управления БСС для различных уровней сетевого взаимодействия. На первом этапе рассмотрены аналитические модели каждого уровня: технического состояния радиоустройств; физического канала с помехами и аппаратурными искажениями; энергопотерь узлов в канале с переменными характеристиками среды; линейной БСС с гетерогенными участками радиосвязи и кластеризации БСС. На втором этапе произведен анализ алгоритмов управления БСС: выбора режима передачи с минимальными искажениями сигналов; оптимизации структуры сигнала с минимальным BER; управления длиной пакета данных и мощностью передатчика; маршрутной балансировки энергопотерь в узлах ретрансляции, а также маршрутизации с минимальными потерями времени и энергии. На третьем этапе произведен синтез полученных результатов, представлена иерархическая инфраструктура мониторинга агропромышленного объекта, учитывающая все уровни взаимодействия БСС, параметры сенсорных узлов и влияние внешних факторов.
Результаты исследования. Предложен и обоснован методический многоуровневый подход к повышению надежности БСС для мониторинга агрообъектов, интегрирующий сетевые параметры, свойства аппаратуры и внешние воздействия, подтвержденный моделированием повышения энергоэффективности, снижения задержек и роста отказоустойчивости. В рамках этого разработана пятииерархическая концепция многоуровневой сетевой инфраструктуры для мониторинга агропромышленных объектов на базе БСС, интегрирующая модели и алгоритмы на уровнях: устройства, физического канала, канала передачи данных, линейного маршрута и сети. Получены одноуровневые и межуровневые зависимости, связывающие показатели эффективности, дестабилизирующие факторы и управляемые параметры.
Обсуждение. Представленный подход устраняет выявленный в литературе разрыв между энергетическими моделями и учетом динамических/информационных ограничений узлов, а также учитывает реальное техническое состояние модемов и термозависимость источников питания. Многоуровневая интеграция критериев (от корреляционных показателей формы сигнала до сетевых вероятностных метрик целостности БСС) позволяет согласовывать локальные оптимизации и системные цели, уменьшая риск конфликтов между уровнями. Принцип согласования уровней и внешнего дополнения обеспечивает итеративную корректировку требований и параметров, что повышает устойчивость принятия решений к неопределенности среды и гетерогенности каналов. Ограничениями текущей работы являются: необходимость калибровки моделей под конкретные аппаратные профили, зависимость эффективности от доступных режимов PHY/MAC и протоколов ARQ, а также чувствительность к точности оценок помеховой обстановки и температурных режимов.
Заключение. Разработанные модели и алгоритмы на пяти уровнях обеспечивают достижение заданных показателей помехоустойчивости, времени доставки и энергопотребления при минимально необходимом задействовании ресурсов, что повышает живучесть и срок службы БСС. Предложенный подход создает основу для перехода к системно спроектированным, воспроизводимым решениям в точном земледелии, снизит ресурсные затраты и экологическую нагрузку, а также повысит устойчивость и рентабельность агропроизводства. Для масштабирования необходимы полевые испытания и публикация эталонных конфигураций и кодов для воспроизводимости.









































