


МЕХАНИКА
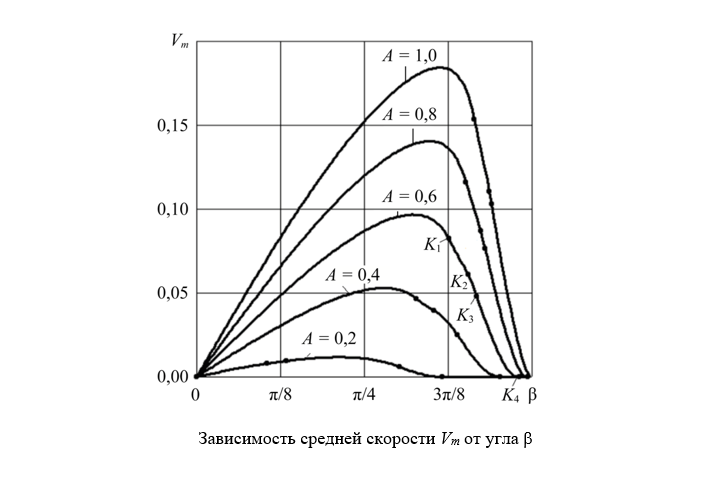
Введение. Исследование движения твердого тела, несущего подвижные массы, значительно упрощает проектирование капсульных роботов, которые могут перемещаться внутри агрессивных сред и выполнять необходимые операции. Достаточно хорошо изучены случаи: движения при взаимодействии твердого тела с опорной плоскостью и в агрессивных средах; вибрационного перемещения сыпучих сред и твердых тел на вибрирующем основании; оптимизации движения твердых тел; варьирования средней скорости и ускорения на различных интервалах движения; зависимости средней скорости от параметров задачи; управления скоростью перемещения внутренней массы для наискорейшего поворота твердого тела. Однако в настоящее время в литературе уделено недостаточно внимания задачам исследования движения тяжелого плоского тела по горизонтальной плоскости под действием гармонической силы, направленной под углом к горизонту, особенно в плане учета всех возможных режимов движения и их особенностей. Это не позволяет определять оптимальные параметры задачи. Поэтому целью данной работы стало выявление особенностей всех возможных режимов движения тяжелого твердого тела по горизонтальной плоскости под действием гармонической силы, направленной под углом к горизонту.
Материалы и методы. В работе использовали уравнения движения механической системы. Для решения стационарных уравнений движения системы применялись как аналитические подходы, так и численные методы. В качестве модели трения была принята модель сухого трения, что позволило получить точные решения для положительного и отрицательного значения скорости проскальзывания с точностью до констант. Значения этих констант определялись из условий стыковки и периодичности решения.
Результаты исследования. Получено аналитическое решение задачи для периодических решений. Выявлены три возможных режима движения. С помощью численного анализа построены зависимости средней за период скорости движения тела от угла наклона силы к горизонту. Установлено оптимальное направление силы.
Обсуждение и заключение. Результаты проведенных исследований позволяют определить оптимальные значения параметров задачи для достижения необходимого значения средней скорости движения твердого тела. В частности, могут быть найдены оптимальные значения амплитуды силы и ее направления для достижения максимального значения средней скорости движения твердого тела.
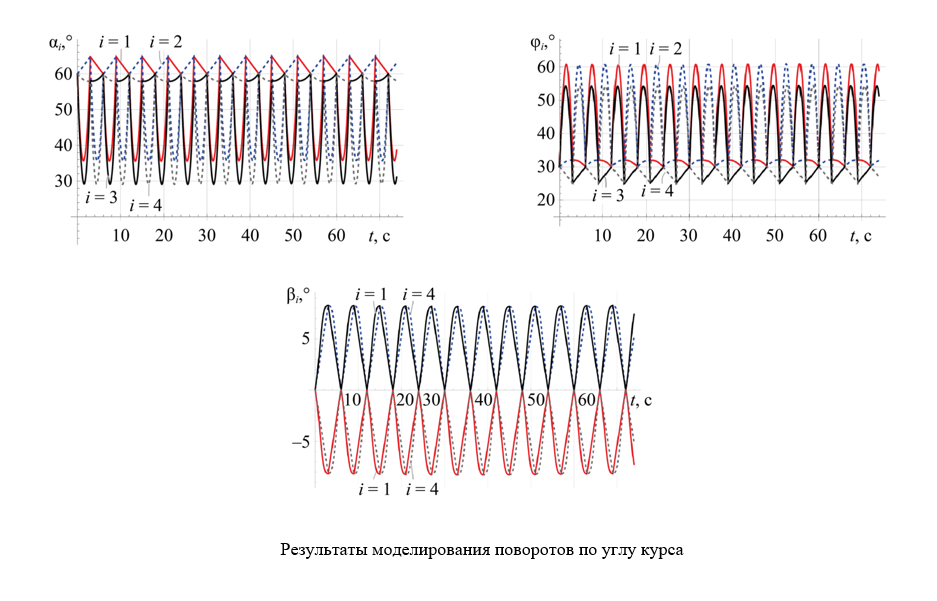
Введение. Шагающие роботы находят широкое применение в промышленности благодаря своим уникальным возможностям передвижения по неровным и сложным поверхностям. Для обеспечения высокой точности управления их движением необходимо разработать математические модели и алгоритмы планирования перемещения робота по различным траекториям. Ключевым аспектом системы управления движением шагающих роботов является планирование перемещений их ног. Несмотря на значительные достижения в области моделирования кинематики четвероногих роботов, в существующих научных публикациях не представлено полноценной кинематической модели для роботов, аналогичных Mini Cheetah. Цель данной работы заключается в разработке кинематической модели четвероногого робота на основе Mini Cheetah, а также в формулировании рекомендаций по оптимизации его походки для обеспечения вращения вокруг различных осей. Создание такой модели позволит улучшить плавность и точность движений робота, что, в свою очередь, повысит его эффективность в реальных производственных условиях.
Материалы и методы. Процесс построения кинематической модели робота основан на использовании формул геометрии пространственного движения твердых тел. Для проверки эффективности предложенных алгоритмов перемещения ног робота при осуществлении поворотных движений его корпуса было применено численное моделирование кинематики робота. Численные расчеты выполнены с использованием математического пакета Wolfram Mathematica.
Результаты исследования. Предложены законы изменения конечных точек ног робота при его вращении вокруг вертикальной оси. Проведенное численное моделирование кинематики робота охватывало повороты корпуса по углам курса, крена и тангажа. По результатам моделирования установлено, что зависимости углов поворота звеньев ног являются периодическими функциями. Рассмотренные поворотные движения платформы робота могут происходить без возникновения сингулярных конфигураций.
Обсуждение и заключение. Результаты численного моделирования поворотных движений платформы робота подтвердили работоспособность предложенного плана переноса ног, который позволяет осуществлять плавное движение корпуса робота и избегать сингулярных конфигураций. Полученная кинематическая модель может быть использована для управления движением робота на кинематическом уровне при перемещениях по криволинейным траекториям. В качестве перспективы для дальнейших исследований стоит выделить разработку математической модели динамики четвероногого робота, а также создание законов управления его движением на динамическом уровне. Это позволит значительно расширить функциональные возможности робота и повысить эффективность его работы в различных условиях эксплуатации.
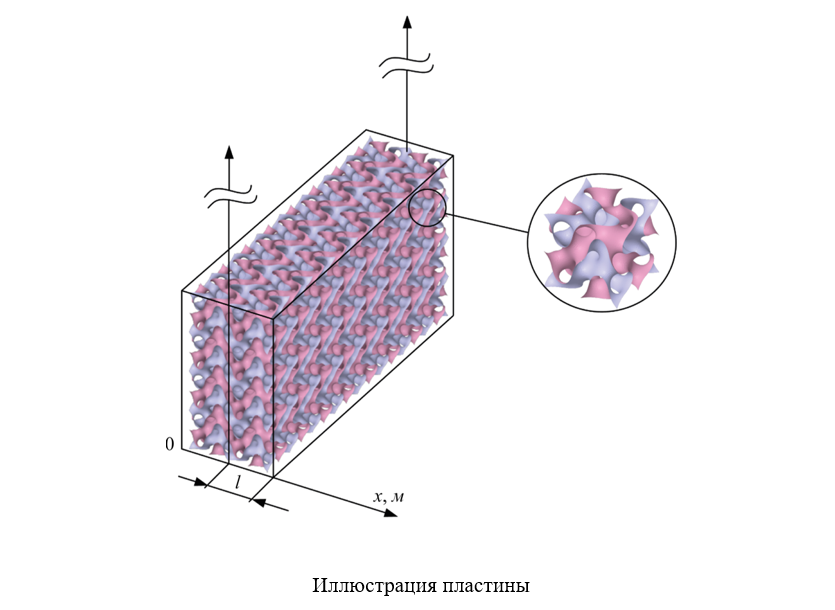
Введение. Термические характеристики материалов, созданных на базе трижды периодических минимальных поверхностей (ТПМП), становятся все более важными в свете роста интереса к материалам с особыми теплофизическими свойствами и их применениям в инженерии, энергетике и других областях. Поскольку эти материалы обладают уникальными структурными и функциональными характеристиками, понимание взаимосвязи между их геометрией и теплофизическими параметрами играет ключевую роль в оптимизации их использования. Несмотря на значительное внимание, уделенное проблеме, исследование взаимосвязи между геометрией пористых структур и их термическими характеристиками остается неполным. Существующие научные работы охватывают лишь отдельные варианты, а полное понимание влияния сложной микро- и макроструктуры на теплопроводность требует дальнейшего изучения. Существующий пробел в научном знании заключается в недостаточной систематизации и обобщении существующих данных, что затрудняет разработку универсальных подходов к расчету теплопроводности в таких материалах. Целью данного исследования являлась разработка упрощенных формул для расчета показателя эффективной теплопроводности пористых структур, основанных на ТПМП-ячейках типа S, предложенных Фишером и Кохом. Авторы также ставили задачу анализа теплопроводного процесса в пластине с заданными параметрами пористости. Это позволит улучшить понимание термодинамических процессов, происходящих в таких системах.
Материалы и методы. Для достижения поставленных целей проведено математическое моделирование, включающее решение граничной задачи с учетом выявленных корреляций. Рассматривается ячеистая конструкция, изготовленная из PETG-пластика и имеющая поры, состоящие из одинаковых повторяющихся элементов. Эти элементы формируют трехмерную минимальную поверхность, которая соответствует модели Фишера-Коха. Анализ проводился с использованием двух методов: расчеты в MathCAD, основанные на методе конечных разностей, и моделирование в ANSYS методом конечных элементов. При этом учитывалось влияние геометрических параметров пористой структуры на ее теплофизические характеристики.
Результаты исследования. Результаты исследования представляют собой численное решение задачи теплопроводности для пористой пластины, принимая во внимание симметричные граничные условия первого рода и наличие внутренних источников тепла, которые остаются постоянными во времени и учитывают топологические особенности материала. В ходе работы были получены распределения температуры как по пространственной координате, так и во времени. Оценено изменение теплового потока в зависимости от вариаций коэффициента пористости пластины. Построены и проанализированы графики распределения изотерм и скорости их перемещения, что позволяет более глубоко понять динамику теплопередачи в рассматриваемой системе.
Обсуждение и заключение. Полученные математические зависимости демонстрируют степень и характер влияния пористости на распределение плотности теплового потока. Было установлено, что изменения в пористости пластины могут как увеличить, так и уменьшить интенсивность теплопереноса, что позволяет достигать необходимых значений термического сопротивления материала. Полученные результаты согласуются с выводами, изложенными в других исследованиях аналогичной тематики, что открывает возможности для их применения в дальнейших исследованиях. Эти результаты могут быть полезны при проектировании систем тепловой защиты для тепловыделяющего оборудования, а также для тепломассообменных трактов тепломеханического оборудования и других приложений. Решения представлены в доступной и понятной форме, что облегчает их использование как для широкого круга исследователей, так и инженеров, и не требует привлечения дорогостоящего программного обеспечения или специализированной вычислительной техники.
МАШИНОСТРОЕНИЕ И МАШИНОВЕДЕНИЕ
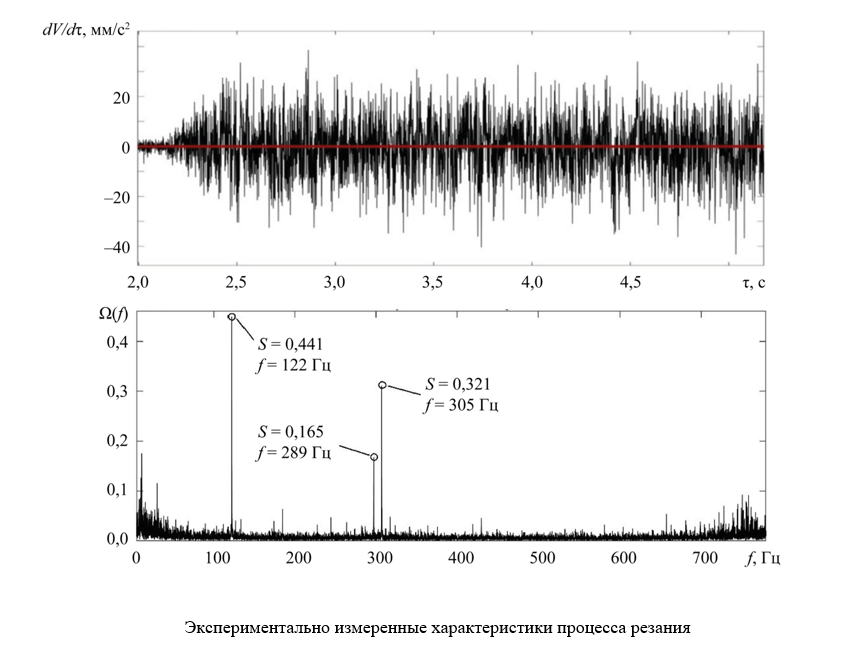
Введение. Современные исследования, направленные на повышение эффективности процессов обработки деталей, подчеркивают важность учета влияния периодических возмущений на динамику резания. Однако немногие работы рассматривают неуправляемые периодические возмущения, источниками которых являются шпиндельные узлы и несущая система станка. Эти возмущения также оказывают значительное влияние на конечные показатели качества процесса резания. Поэтому актуальной задачей в области технологии машиностроения становится раскрытие закономерностей влияния неуправляемых возмущений на динамику процесса резания, что особенно важно для разработки систем автоматизированного выбора технологических режимов или систем вибродиагностики. Цель этой работы заключается в определении механизма влияния периодических флуктуаций параметров обработки, вызванных вибрационными возмущениями, на температуру передней поверхности токарного резца, что является основным показателем развития диффузионного износа твердосплавного инструмента.
Материалы и методы. Исследование влияния периодических возмущений на температуру передней поверхности инструмента проводилось в два этапа. В первом этапе на базе натурного эксперимента по чистовому продольному точению заготовок из стали 10ГН2МФА резцами с пластинами твёрдого сплава Т15К6 были идентифицированы параметры модели возмущений в системе, а именно колебательные ускорения инструмента в процессе его износа. Вибрационные характеристики используемого универсального токарного станка 16К20 измерялись с помощью вибростенда, собранного на основе вибропреобразователей AP2089–100–3.3–02Б, с частотой дискретизации сигнала 10 кГц. На втором этапе проводилось цифровое исследование моделируемых возмущений и их влияния на динамику процесса резания. Результаты опытов анализировались с целью сравнения расчетной максимальной температуры передней поверхности инструмента в моменты, когда один из заданных выходных параметров обработки, полученный в результате цифрового моделирования, достигает экстремального значения под воздействием периодических возмущений.
Результаты исследования. Установлено, что флуктуации параметров технологических режимов резания, вызванные периодическими возмущениями, приводят к колебаниям температуры в зоне контакта инструмента с заготовкой. Наибольшее влияние на температуру в исследуемой системе резания оказало сочетание параметров обработки в моменты достижения экстремальных значений подачи. При этом, когда флуктуации глубины и скорости резания достигали экстремальных величин, значительных изменений температуры контакта не наблюдалось.
Обсуждение и заключение. Результаты проведённого исследования подчеркивают важность анализа влияния периодических возмущений на импульсные изменения контактной температуры в зоне обработки. Приведённая модель взаимосвязи между вибрациями инструмента и температурой в зоне резания может быть использована для оптимизации режимов точения. Критерием оптимальности выступает минимизация износа инструмента, что определяется на основе анализа температурных колебаний и сигналов вибрационной активности инструмента.
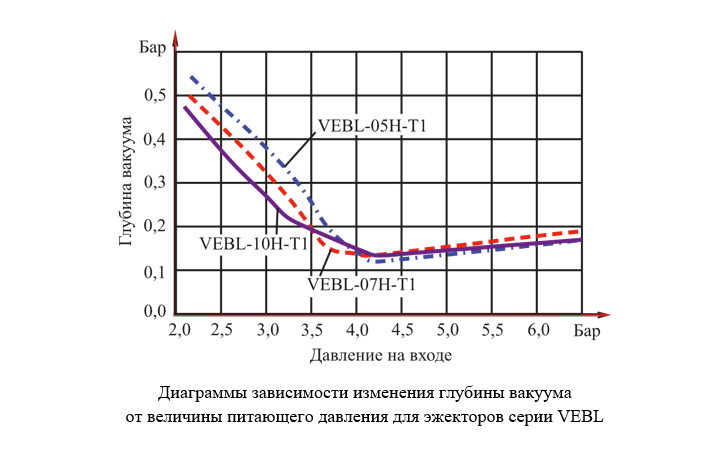
Введение. Вакуумные эжекторы, работающие по принципу Вентури, применяются в различных отраслях промышленности и являются незаменимыми пневматическими устройствами. Важной характеристикой вакуумного эжектора является создаваемая глубина вакуума, где максимальное значение вакуума достигается в определенном интервале питающего давления. Несоблюдение питающего давления влияет на производительность самого эжектора и автоматизированных вакуумных систем в целом. Одним из вариантов решения данной проблемы является установление рекомендуемого диапазона питающего давления в достаточно узком интервале давлений, при котором достигается гарантированное значение глубины вакуума, не используя максимальные возможности эжектора. При этом в технической литературе не приводятся значения зависимости глубины вакуума от питающего давления на всем диапазоне работы эжектора, на которые авторы хотели бы обратить внимание в рамках данной работы. Цель работы — проведение экспериментальных исследований по установлению фактических значений максимальной глубины вакуума в зависимости от величины входного давления эжектора.
Материалы и методы. Для проведения экспериментальных исследований был спроектирован, изготовлен и использован специальный стенд, позволяющий осуществлять исследования вакуумных эжекторов, работающих на основе принципа Вентури. Данный стенд позволяет установить точное значение вакуума в зависимости от входного питающего давления для эжекторов, имеющих диаметр сопла от 0,1 до 4,0 мм, что полностью перекрывает весь диапазон эжекторов, применяемых в реальных секторах экономики. Были исследованы вакуумные эжекторы семейств VEB, VEBL, VED и VEDL производства компании Camozzi в интервале входного питающего давления эжектор от 2,0 до 6,5 бар. Экспериментально определялись фактические значения глубины вакуума в зависимости от величины входного питающего давления для каждого эжектора, а также максимальные значения глубины вакуума, достигаемые каждым эжектором при соответствующем значении входного питающего давления.
Результаты исследования. Экспериментально доказано, что рекомендуемые значения входного питающего давления приведенных в каталогах фирм производителей эжекторов не всегда соответствует действительным значениям. Показано, что отличается и характер полученных графиков. В этой связи необходимо вводить корректировку величины входного питающего давления для достижения максимальной глубины вакуума для каждого типа эжектора.
Обсуждение и заключение. Результаты проведенных экспериментальных исследований позволяют осуществлять рациональный выбор вакуумных эжекторов в зависимости от требуемых технологических задач. Это гарантированно обеспечит работоспособность автоматизированных вакуумных систем и производительность самого эжектора. Результаты исследований могут быть использованы всеми фирмами изготовителями эжекторов для корректировки их базовых каталогов и соответствующих рекомендаций по применению этих изделий.
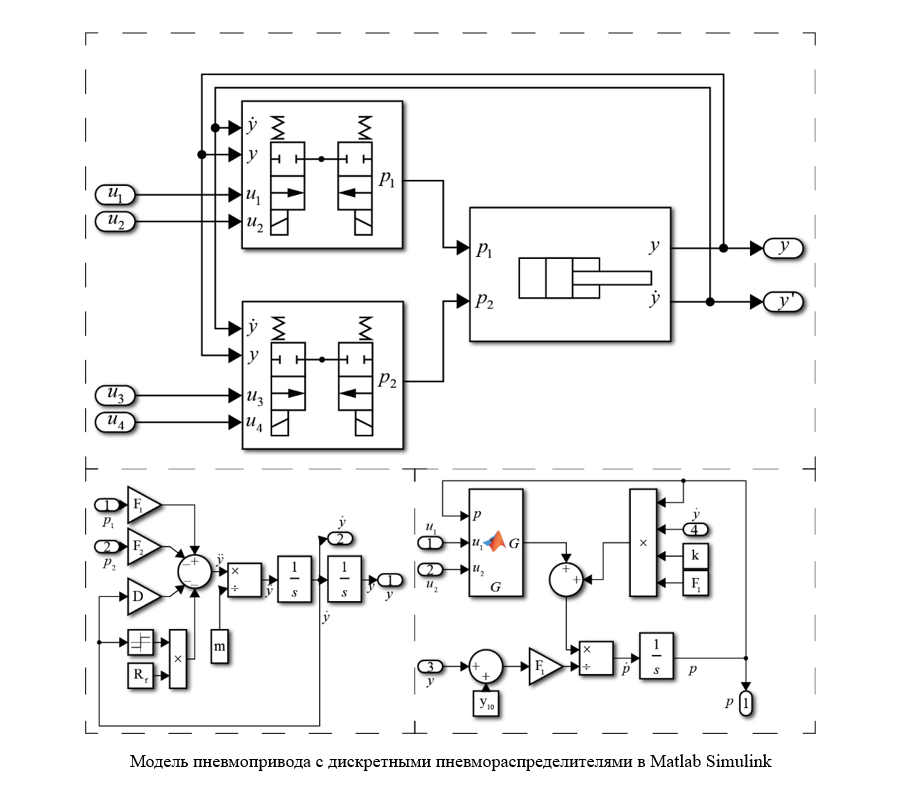
Введение. Пневматические приводы находят широкое применение в промышленности благодаря своей надежности, простоте конструкции и способности функционировать в сложных условиях. Однако при решении задач позиционирования использование традиционных пропорциональных распределителей зачастую оказывается избыточным, что ведет к неоправданному увеличению стоимости и усложнению конструкции. Применение более простых дискретных распределителей сталкивается с проблемой, связанной с необходимостью достижения компромисса между частотой их переключения и точностью позиционирования.
Существующие исследования, в основном, фокусируются на оптимизации отдельных показателей качества работы пневмоприводов и не предлагают эффективных методов поиска компромисса между конфликтующими критериями. Использование классических методов построения множества Парето для многокритериальной оптимизации требует значительных вычислительных ресурсов, что затрудняет их практическое применение.
Целью исследования является разработка методологии многокритериальной оптимизации параметров позиционного электропневматического привода с дискретными распределителями на основе построения множества Парето с использованием суррогатных моделей, позволяющей найти оптимальный баланс между частотой переключений и точностью позиционирования.
Материалы и методы. Исследование проводилось на модели позиционного пневмопривода с дискретными распределителями, реализованной в MATLAB Simulink. Для анализа параметров использовался метод латинского гиперкуба, который обеспечивает равномерное заполнение пространства параметров. Для снижения вычислительных затрат были применены суррогатные модели, построенные с использованием нейронных сетей. В качестве алгоритма управления было выбрано скользящее управление, которое эффективно компенсирует внешние возмущения и неопределенности системы.
Результаты исследования. Оптимизация параметров управления показала возможность достижения высокой точности позиционирования при минимальной частоте переключений распределителей. Использование метода латинского гиперкуба обеспечило равномерное распределение расчетных точек, что позволило построить точную суррогатную модель. Экспериментально было доказано, что предложенный подход снижает вычислительные затраты на 48 %, сохраняя высокую точность моделирования и анализа.
Обсуждение и заключение. Результаты исследования подтверждают, что скользящее управление является эффективным решением для дискретных пневмоприводов в контексте многокритериальной оптимизации. Разработанный подход позволяет значительно уменьшить частоту переключений распределителей без ощутимых потерь в качестве переходных процессов, что способствует продлению сроков службы оборудования и повышению надежности автоматизированных систем. Использование суррогатных моделей и нейросетевых технологий открывает новые перспективы для более быстрого проектирования сложных систем.
ИНФОРМАТИКА, ВЫЧИСЛИТЕЛЬНАЯ ТЕХНИКА И УПРАВЛЕНИЕ
Введение. Анализ управляемости является необходимым этапом для корректной постановки и решения любой задачи оптимального управления. Эта проблема становится особенно актуальной в рамках оптимизации систем с распределенными параметрами, которые описываются уравнениями в частных производных. К таким задачам относится рассматриваемая задача оптимизации формы сопла гидропушки. Оптимальное сопло должно обеспечивать максимальное значение функционала, выражаемого через среднюю силу импульса струи гидропушки. Актуальность данного исследования обусловлена отсутствием единого подхода к анализу управляемости систем с распределёнными параметрами, что затрудняет корректную постановку и решение задач оптимизации. В частности, предыдущие попытки решения задачи оптимизации сопла гидропушки с использованием классического вариационного исчисления не увенчались успехом из-за игнорирования аспектов управляемости. Целью данной работы являлось применение нового подхода, предложенного Толстых В.К., к анализу управляемости для решения задачи оптимального дизайна формы сопла гидропушки.
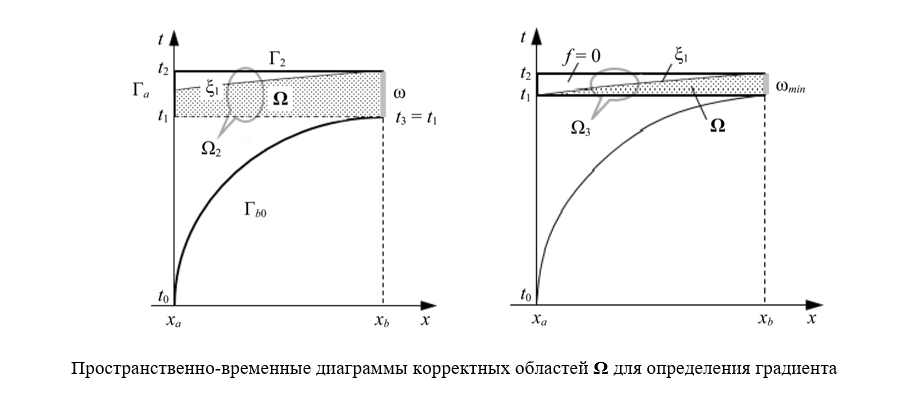
Материалы и методы. В качестве метода исследования использовался анализ управляемости, основанный на условной корректности по Тихонову обратной задачи. Такой подход позволил выявить условия существования градиента целевого функционала и построить регуляризацию решения обратной задачи адаптивными градиентными методами. Это актуально для многоэкстремальных задач, в том числе для задачи оптимальной формы сопла. Она решалась прямым экстремальным подходом в виде непосредственной максимизации целевого функционала на основе его градиента. В процессе исследования использовалась нелинейная, квазиодномерная математическая модель изоэнтропического течения воды в сопле гидропушки. Течение при этом считалось невязким, сжимаемым и дозвуковым.
Результаты исследования. В рамках исследования были получены условия управляемости, которые позволили радикально упростить задачу оптимизации формы сопла гидропушки. Установлено, что для корректного определения градиента целевого функционала необходимо сузить область решения сопряженной задачи до малой прямоугольной области. Использование адаптивных градиентных методов с удовлетворительными шаговыми множителями обеспечило регуляризацию решения. Впервые были найдены две оптимальные формы сопла гидропушки. Первая форма обеспечивает локальный максимум целевого функционала, вторая — глобальный максимум функционала при ограничении на расширение сопла.
Обсуждение и заключение. Полученные результаты показывают, что направленный поиск оптимального решения невозможно осуществить по производной Фреше без учета условий управляемости. Впервые предложенный подход, в сочетании с необходимыми адаптивными градиентными методами оптимизации, позволил не только корректно поставить задачу оптимизации, но и найти оптимальные формы сопла, обеспечивающие максимальную среднюю силу импульса ультраструи. В некоторых случаях для обеспечения устойчивости решения потребовалось введение ограничения на расширение сопла за пределы ствола гидропушки. Это позволило выполнить требования теоремы об управляемости и гарантировало корректность полученных результатов. Теоретическая значимость приведенного исследования заключается в развитии методов анализа управляемости для систем с распределенными параметрами, что создает новые возможности для решения схожих задач в других областях. Результаты работы могут быть применены для оптимизации устройств, работающих на основе импульсных струй, а также для дальнейшего исследования более сложных моделей течения жидкости.









































